6.7 Absolute Encoders
6.7.2 Multiturn Limit Setting
6-25
6.7.2
Multiturn Limit Setting
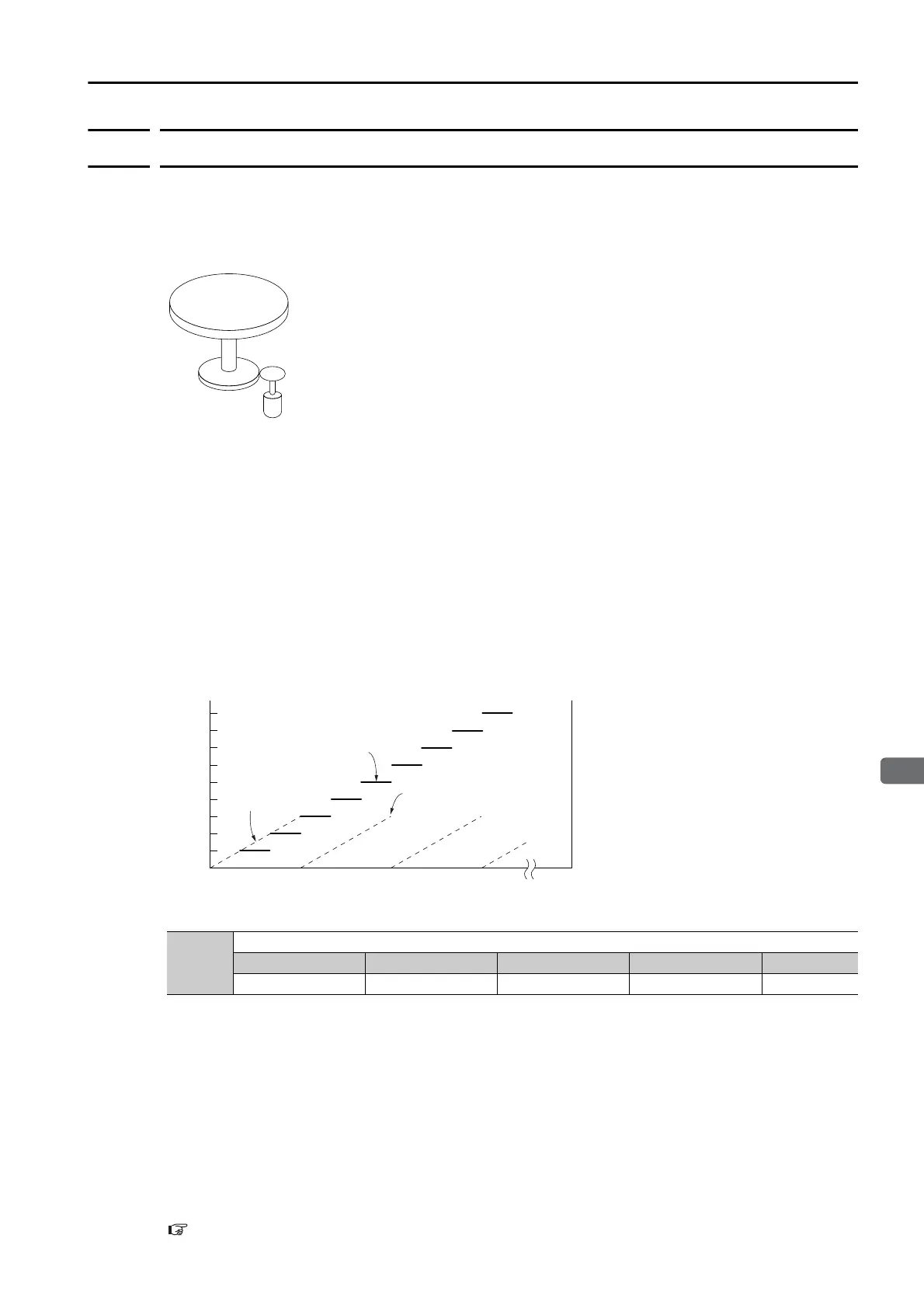
The multiturn limit is used in position control for a turntable or other rotating body.
For example, consider a machine that moves the turntable shown in the following diagram in
only one direction.
Because the turntable moves in only one direction, the upper limit to the number of rotations
that can be counted by an absolute encoder will eventually be exceeded.
The multiturn limit is used in cases like this to prevent fractions from being produced by the
integral ratio of the number of Servomotor rotations and the number of turntable rotations.
For a machine with a ratio of n:m between the number of Servomotor rotations and the number
of turntable rotations, as shown above, the value of m minus 1 will be the setting for the multi-
turn limit setting (Pn205).
Multiturn limit (Pn205) = m − 1
If m = 100 and n = 3 (i.e., the turntable rotates three times for each 100 Servomotor rotations),
the relationship between the number of Servomotor rotations and the number of turntable rota-
tions would be as shown below.
Set Pn205 to 99.
Pn205 = 100 – 1 = 99
Note: This parameter is enabled when you use an absolute encoder.
The data will change as shown below when this parameter is set to anything other than the
default setting.
• If the Servomotor operates in the reverse direction when the multiturn data is 0, the multiturn
data will change to the value set in Pn205.
• If the motor operates in the forward direction when the multiturn data is at the value set in
Pn205, the multiturn data will change to 0.
Set Pn205 to one less than the desired multiturn data.
If you change the multiturn limit in Pn205, an A.CC0 alarm (Multiturn Limit Disagreement) will be
displayed because the setting disagrees with the value in the encoder. Refer to the following
section for the procedure to change the multiturn limit settings in the encoder.
6.7.3 Multiturn Limit Disagreement Alarm (A.CC0) on page 6-26
Pn205
Multiturn Limit
Setting Range Setting Unit Default Setting When Enabled Classification
0 to 65,535 1 Rev 65,535 After restart Setup
Turntable
n:m
Servomotor
Gear
0
1
2
3
4
5
6
7
8
9
100 200 300 0
100
50
Number of table rotations
Multiturn data
Number of table rotations
Multiturn data
Setting of Pn205 = 99
Number of Servomotor rotations

 Loading...
Loading...






