13.3 Program Table Operation
13.3.5 Settings in the Program Table
13-13
13
Operation with Digital I/O
13.3.5
Settings in the Program Table
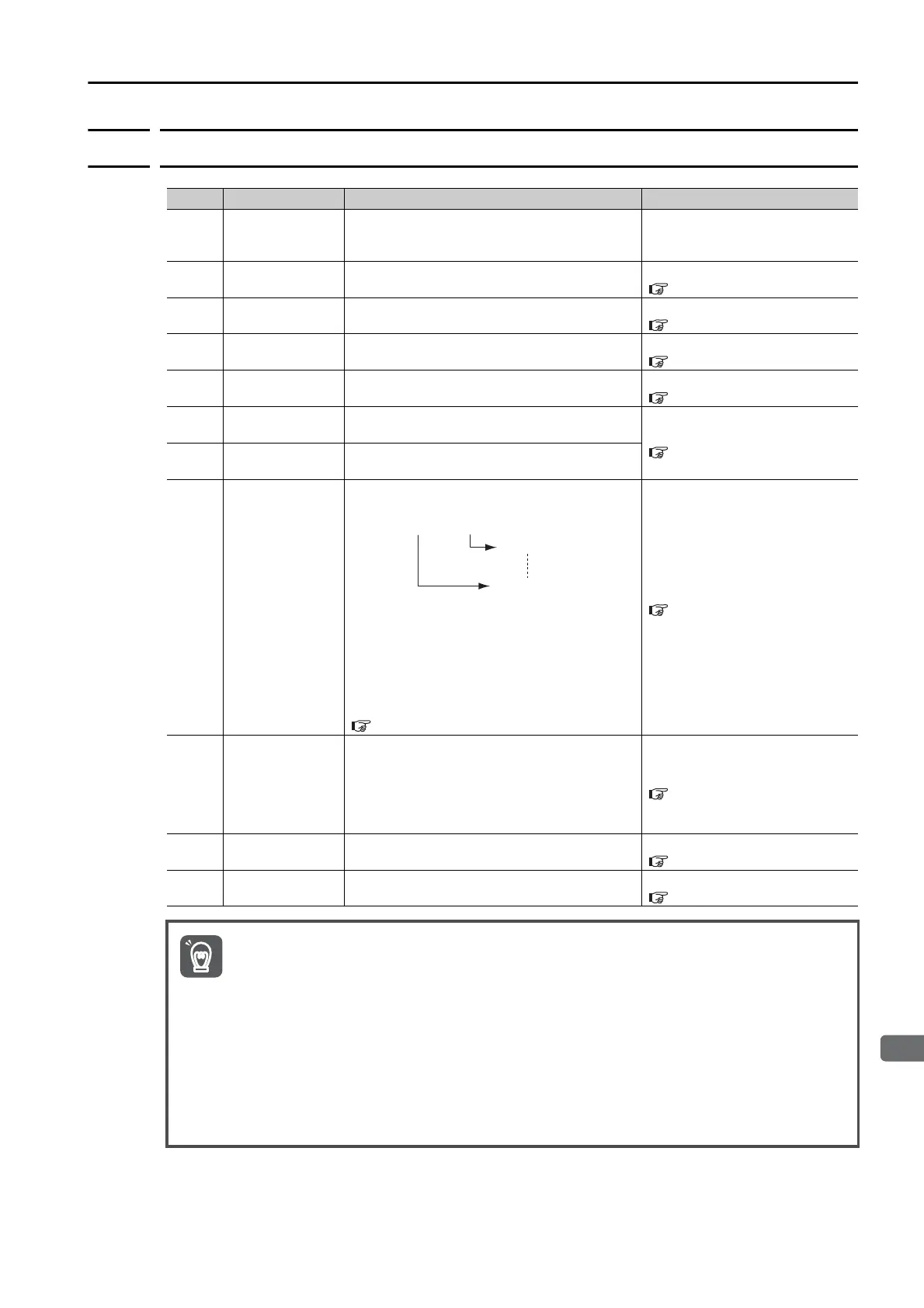
Item Name Meaning Setting Procedure
PGM
STEP
Program step
Numbers are used to identify the program
steps in the program table.
The /SEL0 to /SEL7 signals are
used to specify the program
step.
POS Target position Specifies the target position.
Refer to the following section.
POS on page 13-16
SPD
Positioning
speed
Specifies the target speed for positioning.
Refer to the following section.
SPD on page 13-17
RDST
Registration dis-
tance
Specifies the travel distance after the trigger
signal (/RGRT) is input.
Refer to the following section.
RDST on page 13-18
RSPD
Registration
speed
Specifies the target speed for positioning
after the trigger signal (/RGRT) is input.
Refer to the following section.
RSPD on page 13-18
ACC Acceleration rate
Specifies the acceleration rate to use to reach
the positioning speed.
Refer to the following section.
ACC and DEC on page 13-19
DEC Deceleration rate
Specifies the deceleration rate from the posi-
tioning speed.
POUT
Programmable
output specifica-
tion
Specifies the output status of
/POUT0 to /POUT7.
n = N, A, Z, or:
N: Non-active (OFF)
A: Active (ON)
Z: ZONE signal
A colon (:) indicates using the specification
from the previous program step.
Refer to the following section for information
on the ZONE signals.
13.5 ZONE Outputs
Refer to the following section.
POUT (Output Signal) on page
13-20
EVENT End condition
Specifies the condition to use to determine
when the program step is completed. When
the end condition is met and the number of
executions specified for LOOP is completed,
execution jumps to the program step speci-
fied by NEXT.
Refer to the following section.
EVENT on page 13-21
LOOP Number of loops
Specifies the number of times to execute the
program step.
Refer to the following section.
LOOP on page 13-21
NEXT
Next program
step
Specify the program step to execute after
completion of the current program step.
Refer to the following section.
NEXT on page 13-22
• If you specify new positioning during positioning, an E53E (Movement Reference Duplication)
error will occur and program table operation will be stopped. To start operation again, turn the
START-STOP signal OFF and then ON again. Execution will be restarted from the next step.
• If the target position (POS) is ±INFINITE and the registration distance (RDST) is “−” (no registra-
tion), you can change the program step to change the speed.
In this case, the Servomotor will simply change to the new speed. In all other cases, you can-
not change the program step to change the speed. An E53E (Movement Reference Duplica-
tion) error will occur.
• You can change the settings in the program table only when program table operation is can-
celed.
If program table operation is in progress or stopped, you cannot change the settings, even for
program steps that are not currently being executed. An E5EE (Execution Not Possible during
Program Table Operation) error will occur.

 Loading...
Loading...






