8.12 Additional Adjustment Functions
8.12.4 Current Control Mode Selection
8-70
Operating Procedure for Gravity Compensation
Use the following procedure to perform gravity compensation.
1.
Set Pn475 to n.1 (Enable gravity compensation).
2.
To enable changes to the settings, turn the power supply to the SERVOPACK OFF and
ON again.
3.
Use SigmaWin+ or an analog monitor to find the torque reference value when the motor
is stopped with the servo ON.
4.
Set the torque reference value found in step 3 in Pn476 (Gravity Compensation Torque).
5.
Turn the servo ON and OFF a few times and fine-tune Pn476 so that the moving part of
the machine does not fall.
8.12.4
Current Control Mode Selection
Current control mode selection reduces high-frequency noise while the Servomotor is being
stopped.
The setting depends on the capacity of the SERVOPACK.
To use current control mode selection, use current control mode 2 (set Pn009 to n.1 or
n.2).
• SERVOPACK Models SGD7S-R70A, -R90A, -1R6A, -2R8A, -3R8A, -5R5A, and -7R6A
• SERVOPACK Models SGD7S-120A, -180A, -200A, -330A, -470A, -550A, -590A, and -780A
8.12.5
Current Gain Level Setting
You can set the current gain level to reduce noise by adjusting the parameter for current control
inside the SERVOPACK according to the speed loop gain (Pn100). The noise level can be
reduced by decreasing the current gain level (Pn13D) from its default setting of 2,000% (dis-
abled). However, if the setting is decreased, the level of noise will be lowered, but the response
characteristic of the SERVOPACK will also be reduced. Adjust the current gain level within the
range that maintains the SERVOPACK response characteristic.
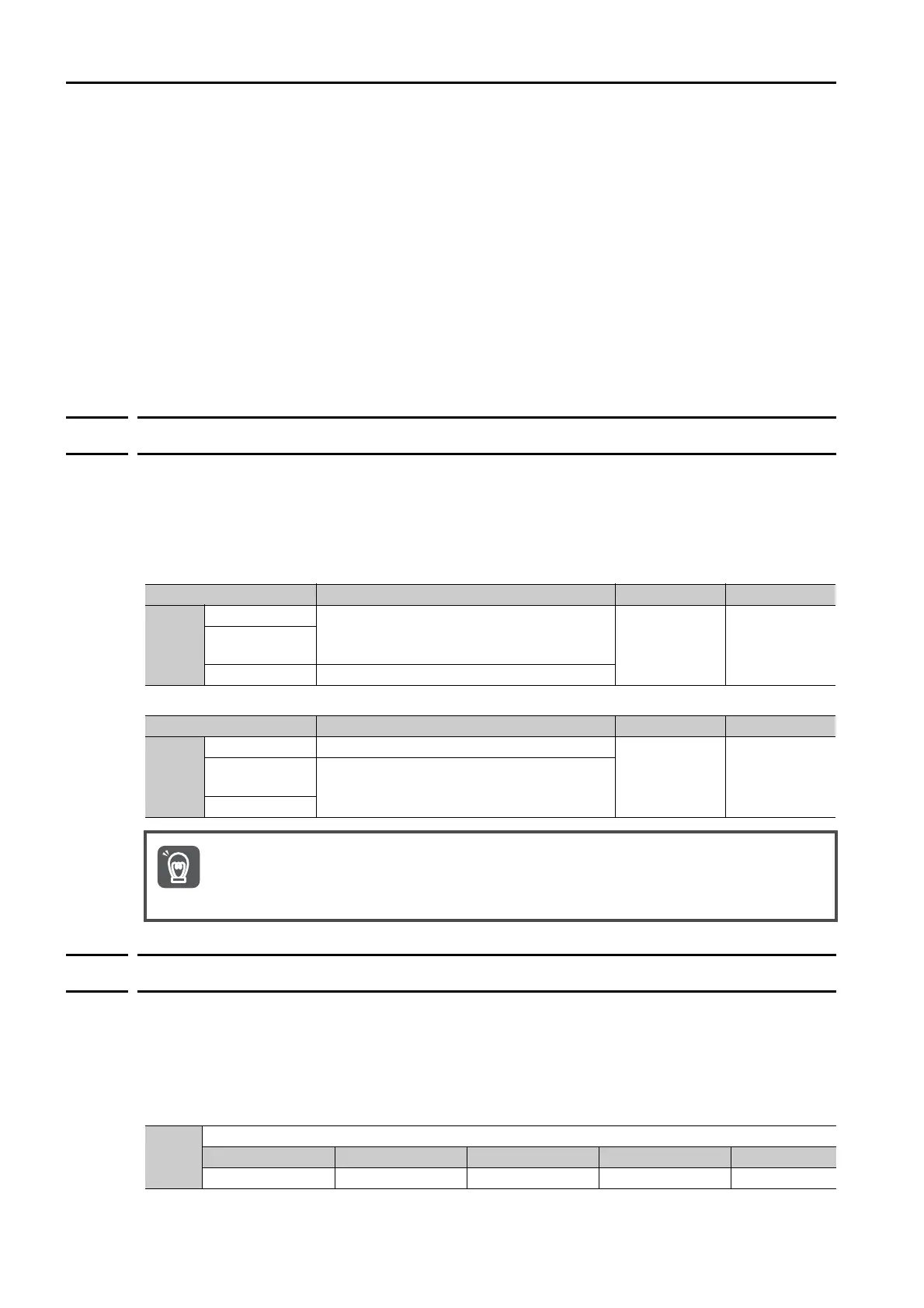
Parameter Meaning When Enabled Classification
Pn009
n.
0
Use current control mode 1.
After restart Tuning
n. 1
(default setting)
n. 2 Use current control mode 2 (low noise).
Parameter Meaning When Enabled Classification
Pn009
n.
0 Use current control mode 1.
After restart Tuning
n. 1
(default setting)
Use current control mode 2 (low noise).
n. 2
If current control mode 2 is selected, the load ratio may increase while the Servomotor is being
stopped.
Important
Pn13D
Current Gain Level
Setting Range Setting Unit Default Setting When Enabled Classification
100 to 2,000 1% 2,000 Immediately Tuning

 Loading...
Loading...






