5.2 User Programs
5.2.2 Motion Programs
5-15
Outline of Motion Control Systems
[ b ] Control Signal
Program control signals (e.g., program operation start requests and program stop requests) need to be entered to exe-
cute the motion program.
The following types of signals for controlling motion programs are available.
* 1. System work number setting
When a motion program is registered in M-EXECUTOR:
Unable to designate it. The same system work number as No. defined in the system is used.
When a motion program is invoked by a MSEE command from a ladder program:
OFF: A system work automatically retrieved by system is used. The system work number may differ in each
case.
ON: A work with the designated system work number is used.
However, when a work occupied by M-EXECUTOR is designated, “BitE: Error without a system work” is
reported to the status.
* 2. Override setting for interpolation
OFF: 100% fixed at an override for interpolation
ON: Depends on the designated override for interpolation.
Use signals conforming to the above signal types when writing ladder programs.
Note: Motion programs are executed if the program operation start request signal is ON when the power is
turned ON.
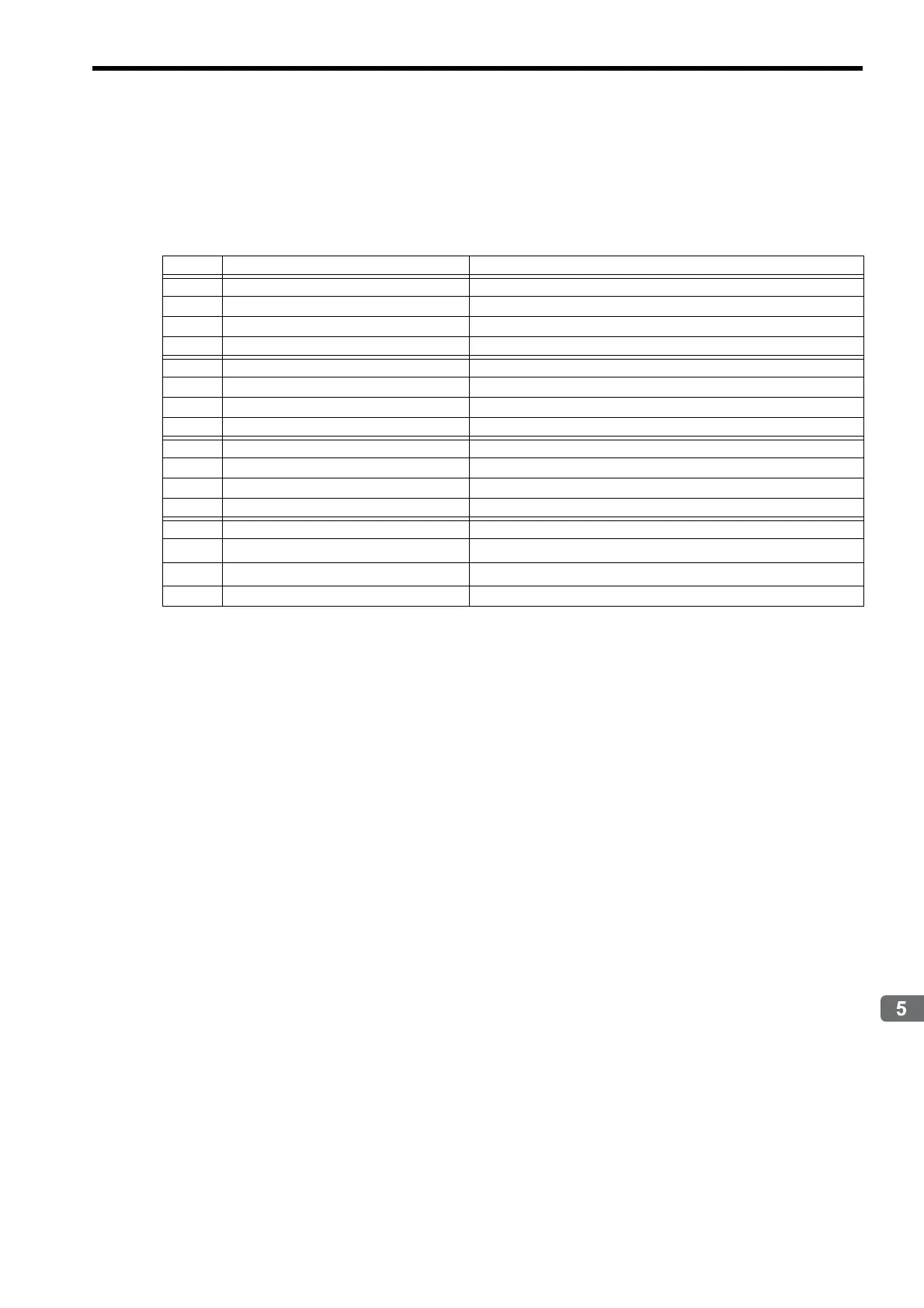
Table 5.2 Control Signals
Bit No. Signal Name Signal Type
0 Program operation start request Differential or NO contact input
1 Program pause request NO contact
2 Program stop request NO contact
3 Program single block mode selection NO contact
4 Program single block start request Differential or NO contact input
5 Alarm reset request NO contact
6 Program continuous operation start request Differential or NO contact input
7 (Reserved) −
8 Skip 1 information NO contact
9 Skip 2 information NO contact
A (Reserved) −
B (Reserved) −
C (Reserved) −
D
System work number setting
*1
NO contact
E
Override setting for interpolation
*2
NO contact
F (reserved) −