Electrical
Troubleshooting Guide
IRB6400 M94A
Page 10 - 4
Calibration Procedures
10.2 "Rough" Resolver Calibration Procedure
The only time that the resolvers should be calibrated
using this method is when the resolver has been
mechanically disassembled from the mechanical
unit. (Such as if a motor is removed.)
The term “rough” resolver calibration is used to indicate
that this is not the most accurate way to calibrate the
resolvers. However it is the easiest and fastest way to
calibrate the resolvers in most cases. After performing
this procedure program touch up may be required.
NOTE: If your application can not tolerate this
rough calibration then you may want to use
the precision resolver calibration procedure
in this chapter.
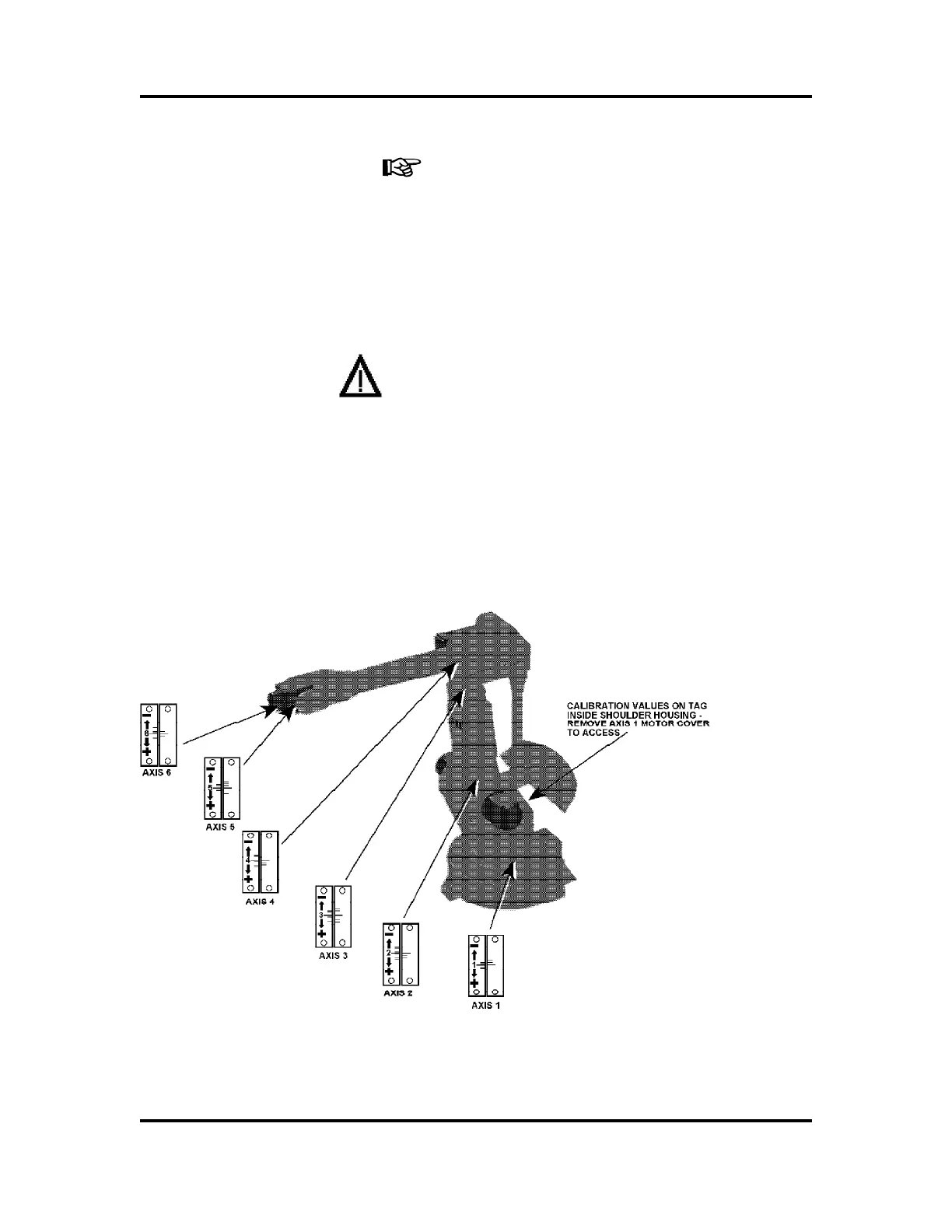
1. Move the axis (by using the joystick) to be calibrated
to the calibration position. The more accurate this
is done the better the calibration will work. The
calibration position is shown in the figure below.
There are calibration plates mounted on each axis
to indicate when the robot is at its calibration
position.
NOTE: If Axis 3 is to be moved to its calibration
position you must move Axis 2 to its
calibration position first.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com