Page 3 - 9
Loading System Software
Electrical
Troubleshooting Guide
IRB6400 M94A
3.5 Resolver Revolution Counter Update
After loading system software, the resolver counter
revolutions must be updated. The robot does not know
where it is and must be told by updating these counters.
1. Move the robot to the calibration position using the
joystick. Each axis may be moved and updated
individually, except for Axis three. Axis three's
position depends on axis two’s position. Always
have Axis two in position before moving axis three
into position.
IMPORTANT: Axis 6 has no hard stops. This
means that when a robot is not updated, axis
six is allowed to rotate endlessly. However, the
revolution counter will only be correct at one
position and being multiple axis revolutions off
won’t work correctly.
NOTE: If counter values are lost the robot will not move
in linear motion.
2. When the robot has been moved into the calibration
position, press
MISC
SERVICE
VIEW
CALIBRATION
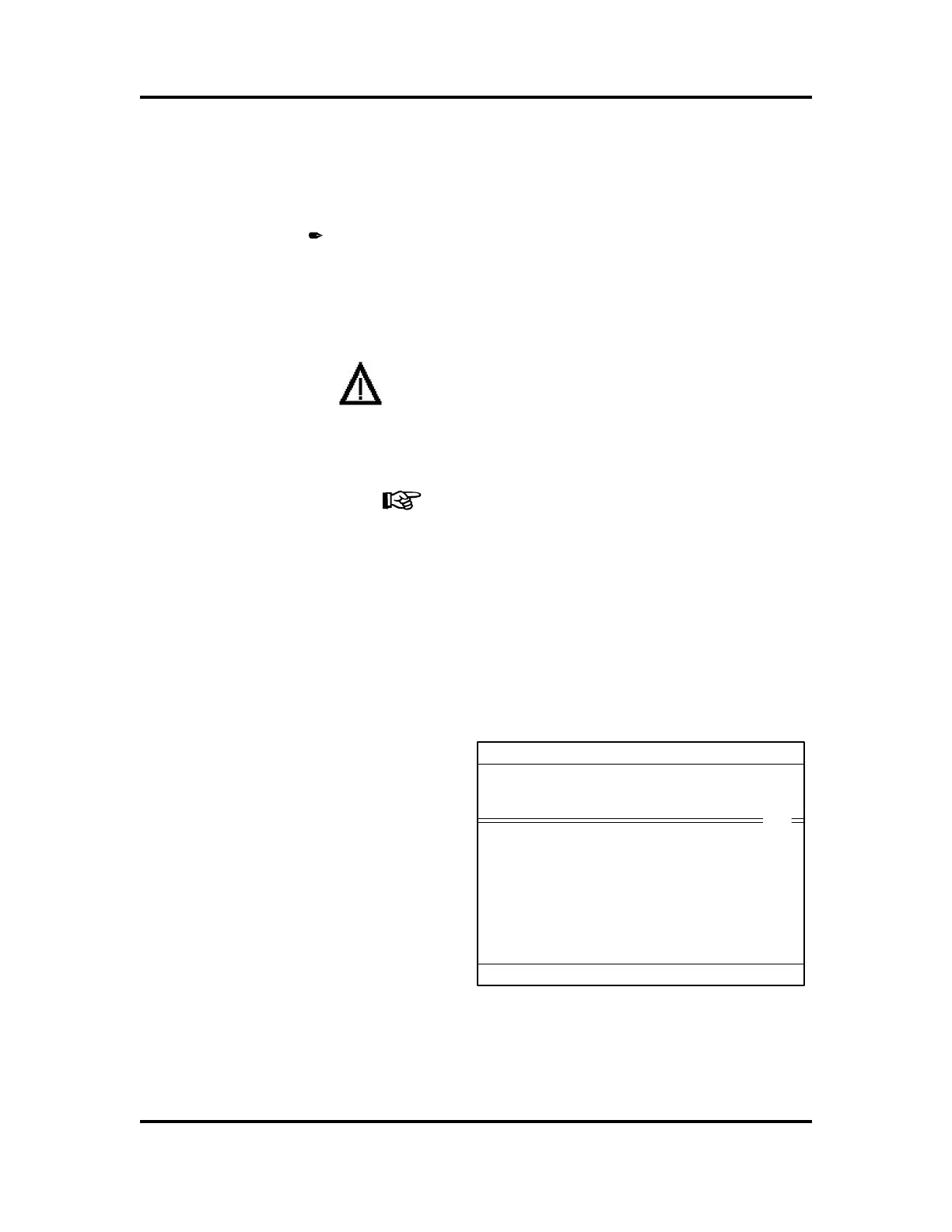
The following screen will be displayed.
Fig. 3-3 ............
File
Edit View Calib
1 (1)
Service Calibration
Unit Status
IRB
Not Rev. updated
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com