188 Rockwell Automation Publication 2198-UM001I-EN-P - May 2019
Chapter 10 Kinetix 5500 Safe Torque-off - Integrated Safety
When you issue a motion direct command to an axis to produce torque in
Program mode, for example MSO or MDS, with the safety connection present
to the drive, a warning message is presented before the motion direct command
is executed, as shown in Figure 83
.
Figure 83 - STO Bypass Prompt When the Safety Controller is in Program Mode
The warning in Figure 83 is displayed the first time a motion direct command
is issued.
After you acknowledge the warning message by clicking Yes, torque is
permitted by the drive and a warning message is indicated in the software as
shown in Figure 84
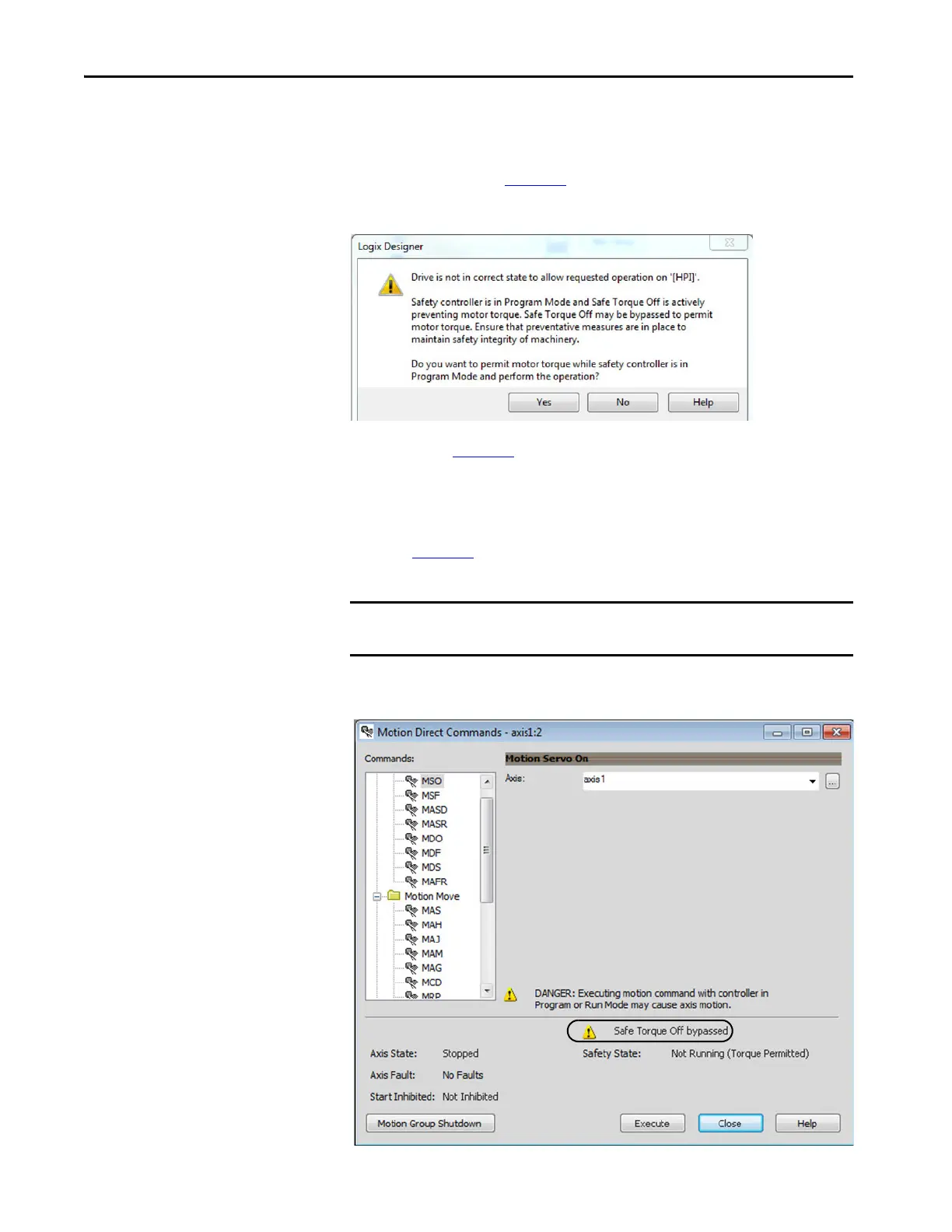
. Safety state = Not Running (torque permitted), Axis state
= Stopped/Running, Persistent Warning = Safe Torque Off Bypassed.
Figure 84 - Safety State Indications After Controller Transitions to Program Mode
(MDC executing)
IMPORTANT Switch the controller to Run mode to exit Motion Direct Command mode
with STO function bypassed.

 Loading...
Loading...






