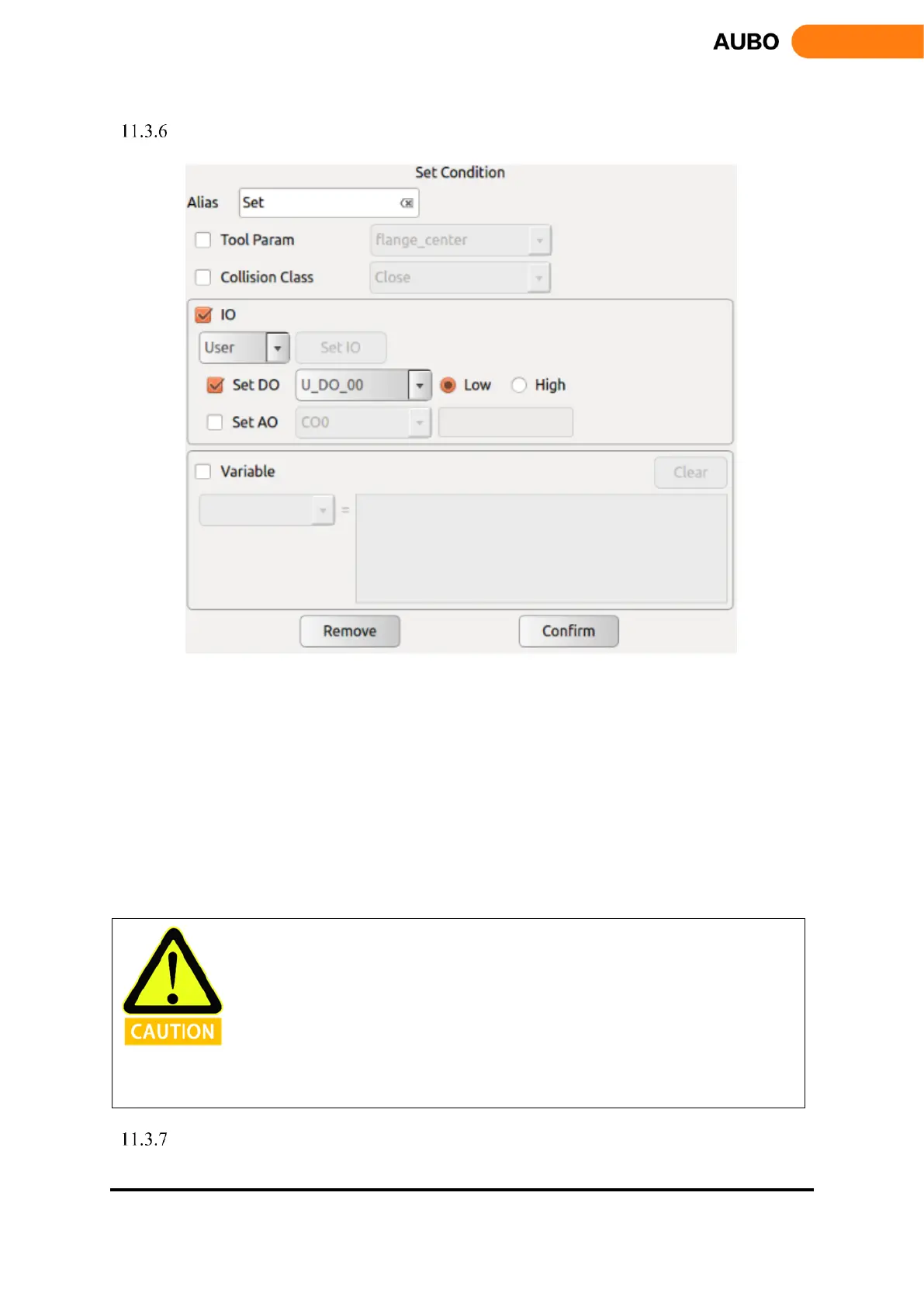
Set
Figure 11.14 Set
Choose【Tool Param-Set Tcp Center】: Set the deviation of current tool payload(TCP)focus
relative to end flange center in XYZ three directions.
Choose【Collision Class】: Set the collision detection level.
Choose【IO type】: Choose IO type to set the DO/AO state.
Choose【Variable】: Choose a variable on the below drop-down list. Input an expression to assign a
value to the choose variable, which should follow C language arithmetic rule. Click【Clear】to clear
expression.
Click【Remove】to remove Set command.
Click【Confirm】to confirm and save the configurations.
1. In the actual operation, inaccuracy settings will cause different errors including
wrong stop.
2. If these settings are wrong, the manipulator and control box will not function
correctly and may become dangerous to people or equipment around them.