Figure 10.9 Position control(base)
Figure 10.10 Position control(end)
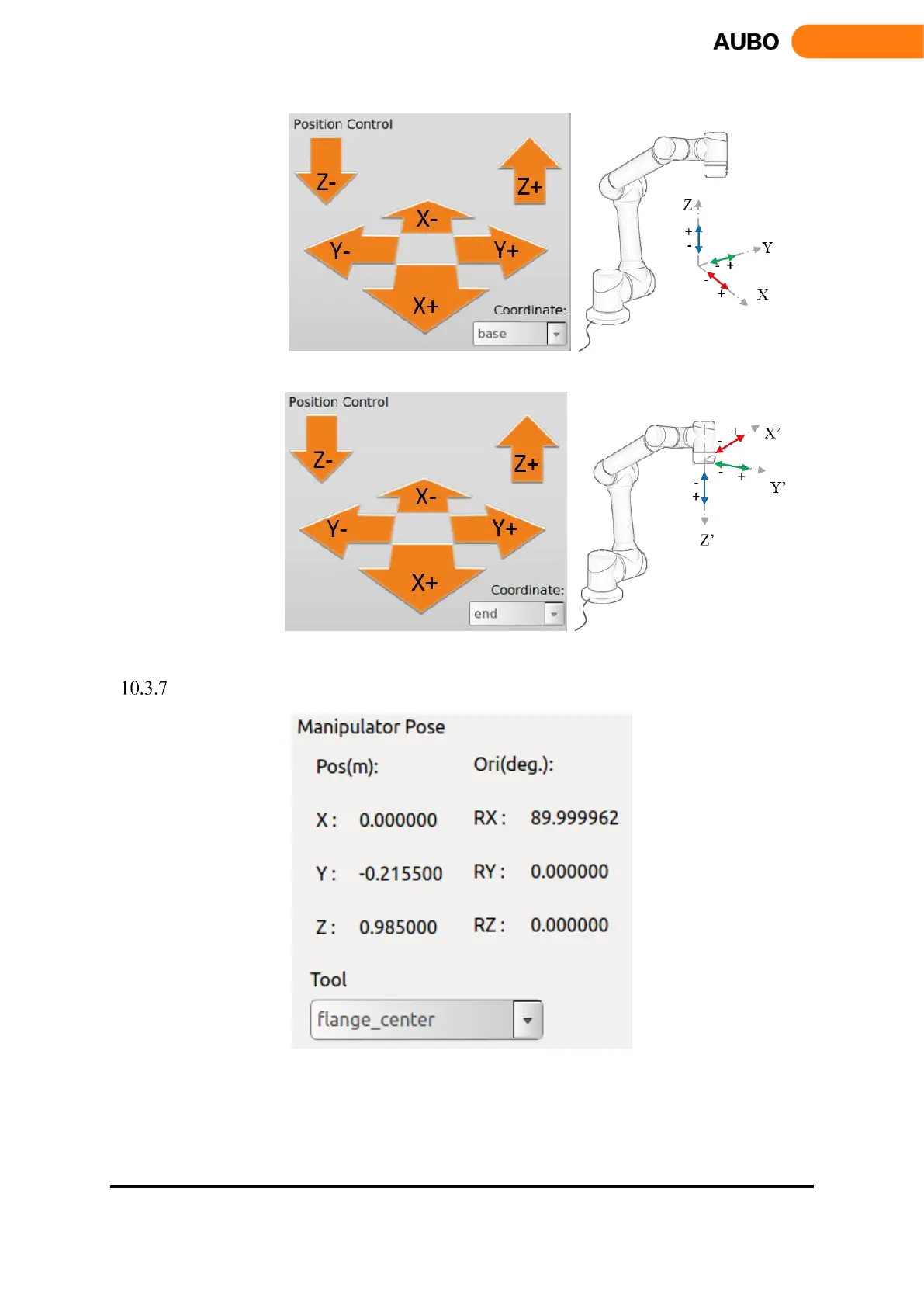
Robot real-time status parameter display
Figure 10.11 Pose and position information.
The X, Y, Z coordinates indicates the coordinate of tool flange center (Selected tool coordinate system,
base coordinate system, end coordinate system and user-defined coordinate system). The W, X, Y, Z are
represented to end pose quaternions.
End pose is represented by quaternions, which can also be transformed as other representations (for