Reduce Mode Input
The user can use this interface to control the manipulator enters the reduced mode. In this mode, the motion
parameters (joint speed, TCP speed) of the manipulator are limited to the user-defined reduced mode range.
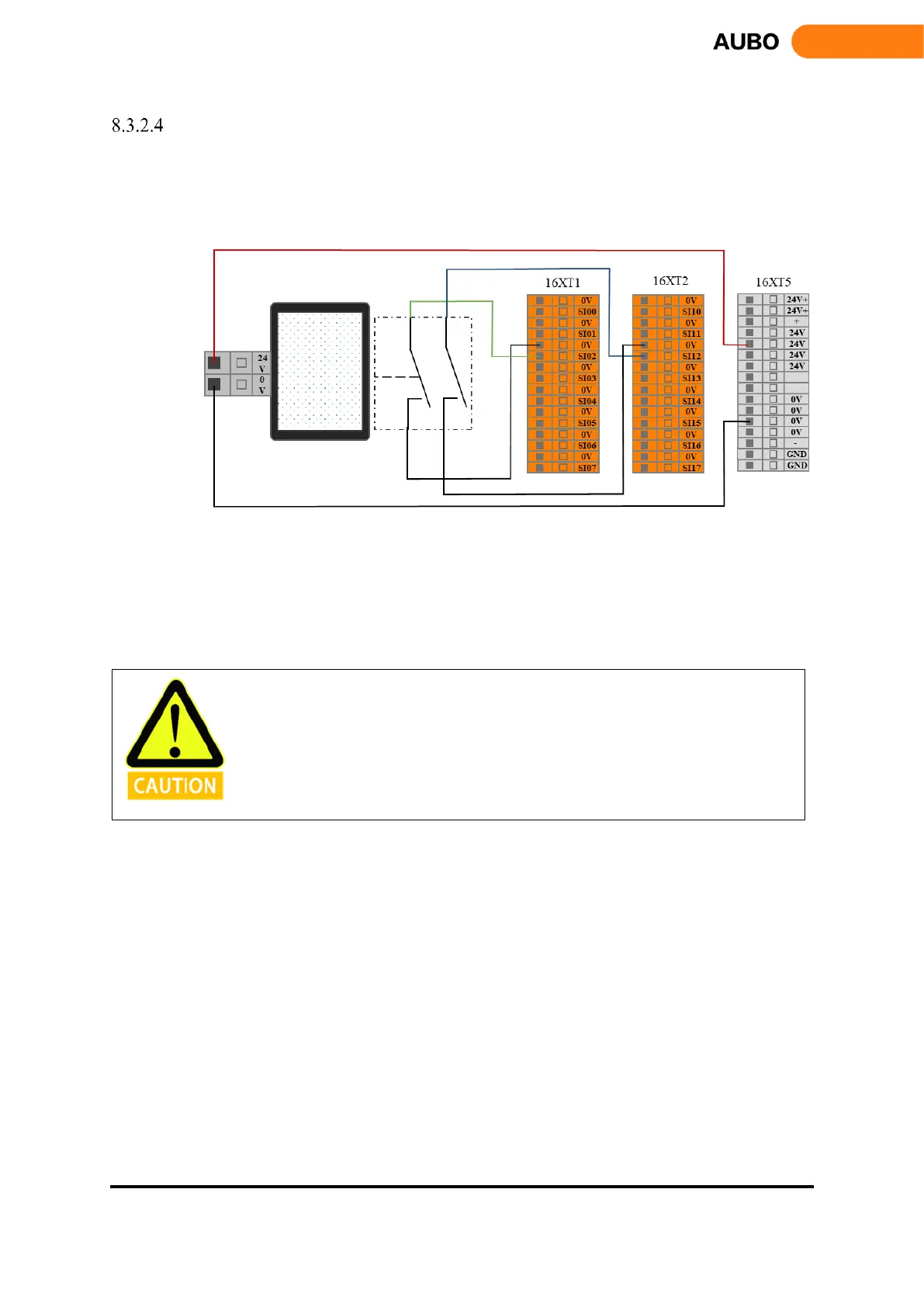
The user can refer to the following example, using a safety mat to connect to the reduced mode input interface.
See the next figure.
Figure 8.9 Reduced mode input connection
When the operator enters the safety zone, the robot enters the reduction mode, and the motion parameters
(joint speed, TCP speed) of the manipulator are limited to the user-defined reduced mode range. After the
operator leaves the safety zone, the manipulator exits the reduced mode and enters the normal mode, and the
robot moves normally.
• In this mode, the response time of the system is 1200ms. If the user operates too
frequently, the system may report an error.
• When using this type of configuration, the user needs to configure the reduced
mode motion parameters through the AUBOPE.