Robot Moving Output
Through this interface, the user can outputs the robot moving signal to the outside when the robot moves
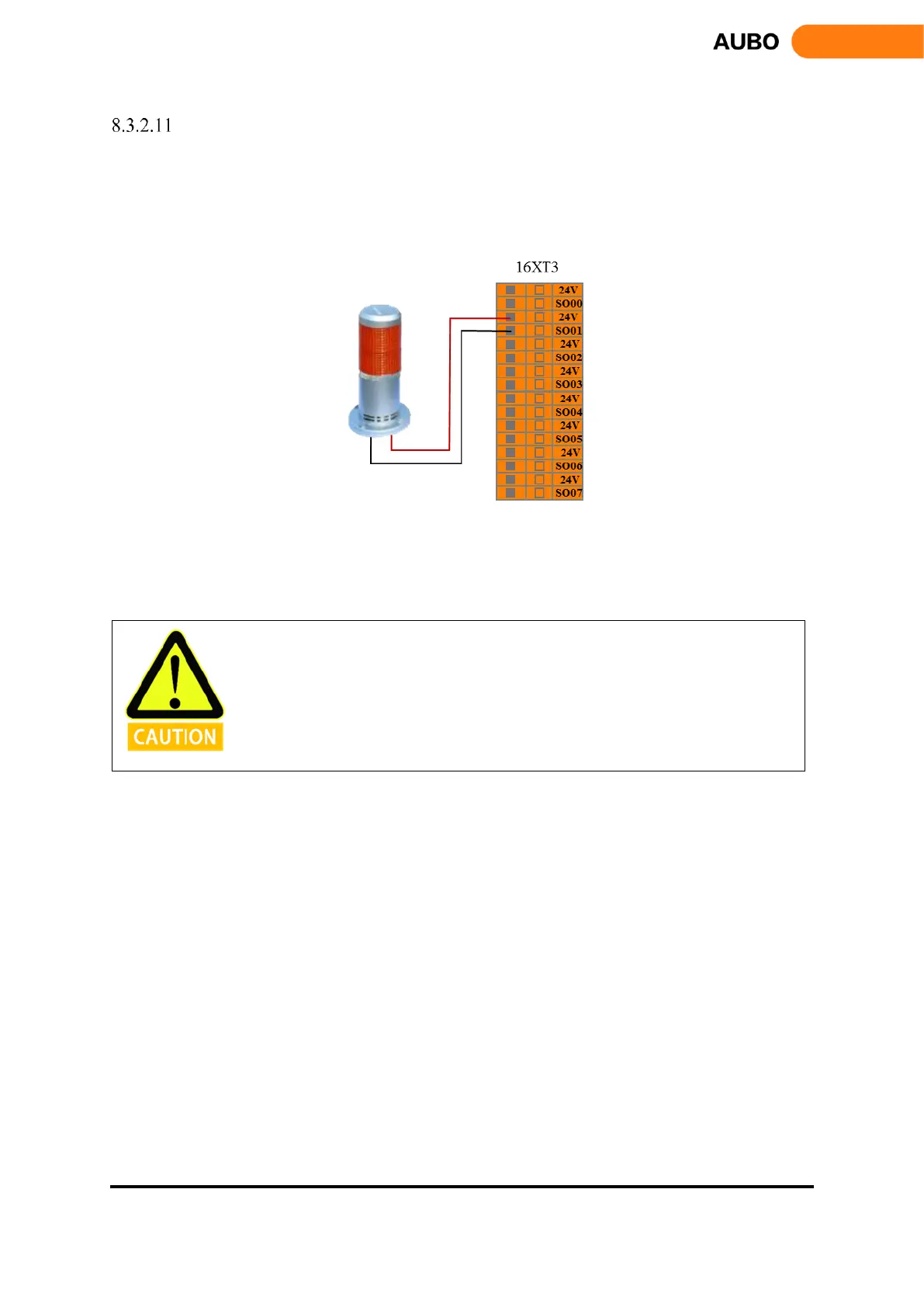
normally. The user can refer to the following example to connect the external indicator to the robot moving
output interface. See the figure below.
Figure 8.16 Figure robot moving output connection
In this configuration, when the robot moves normally, device outputs the robot moving signal to the outside
and the external robot moving status indicator lights.