InteliDrive Lite, SW version 1.9
ID-FLX-Lite-1.9r1 Reference Guide.pdf, ©ComAp – August 2015
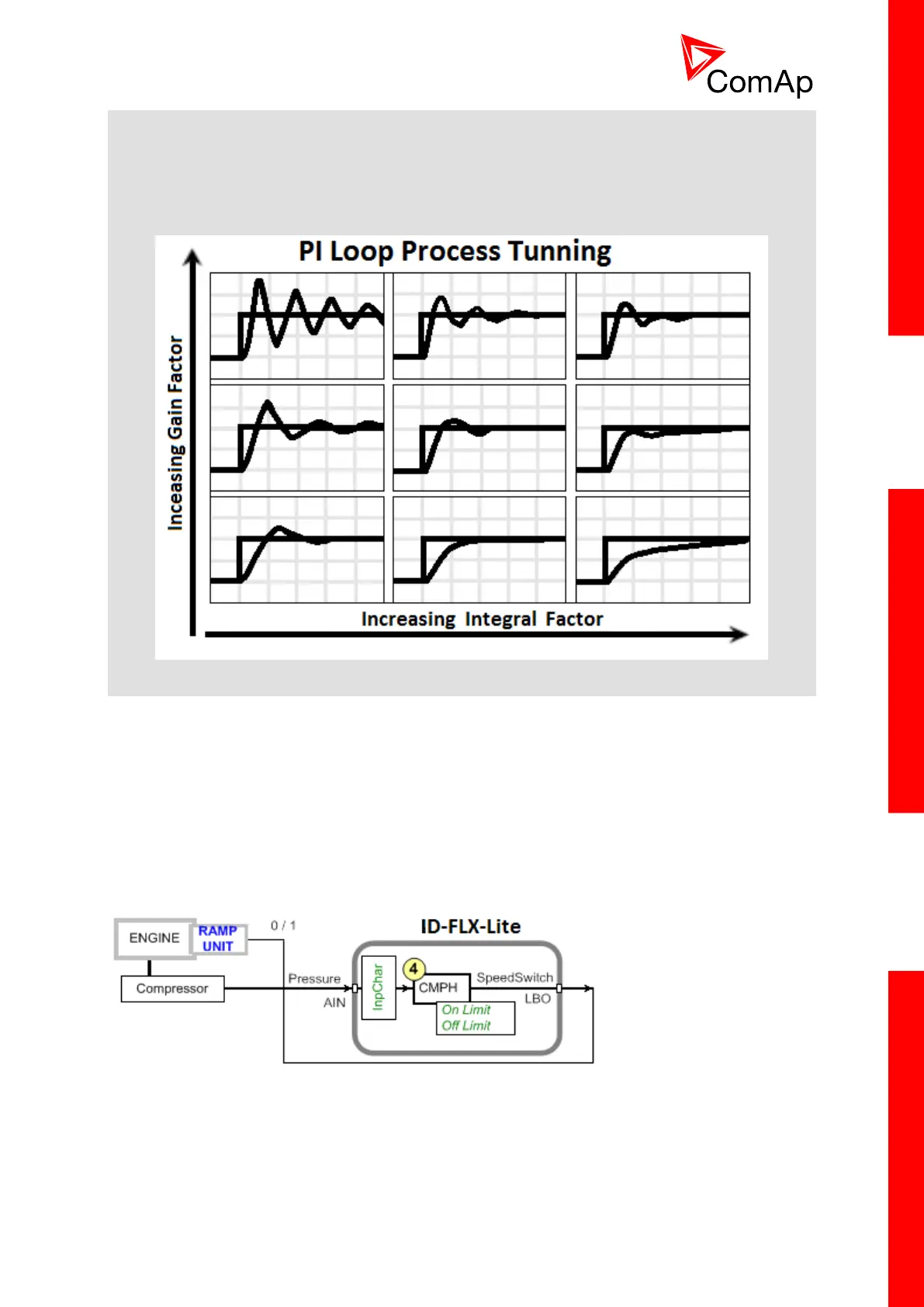
Here are two tunning parameters that can be adjusted Reg Gain and Reg Integral. These parameters
interact each other, see the graphic below. Picture shows how differences in Gain and Integral can
affect PI loop’s responsiveness. The central pic is as base case with fast change with minimum
oscillations to required level. Upper left graph shows high gain and low integral values, what produce
large oscillation with slow smoothing. Opposite case is on the lower right graph, which shows low gain
and high integral values. The response of the system is sluggish.
7.5.8 Reg CMP Input [CU:AI1, CU:AI2, CU:AI3, CU:AI4, CU:AI5,
CU:AI6, CU:AI7, CU:AI8, CU:AI9, AIO:IA1,
AIO:AI2, AIO:AI3, AIO:AI4, RPM-BI3 ]
This is comparator with hysteresis analog input selection from controller analog inputs or from
extension module inputs. It is also possible to use Binary input 3 in function of RPM detection.
Default state: CU:AI1
7.5.9 Reg CMP On [-]
Limit to close LBO SpeedSwitch.