CECX modular control system
The system configuration will be added with an entry.
If the message appears "Caution! The following PDOs are currently not active: ...", it can be ignored.
These are PDOs, which are created but not used in the system.
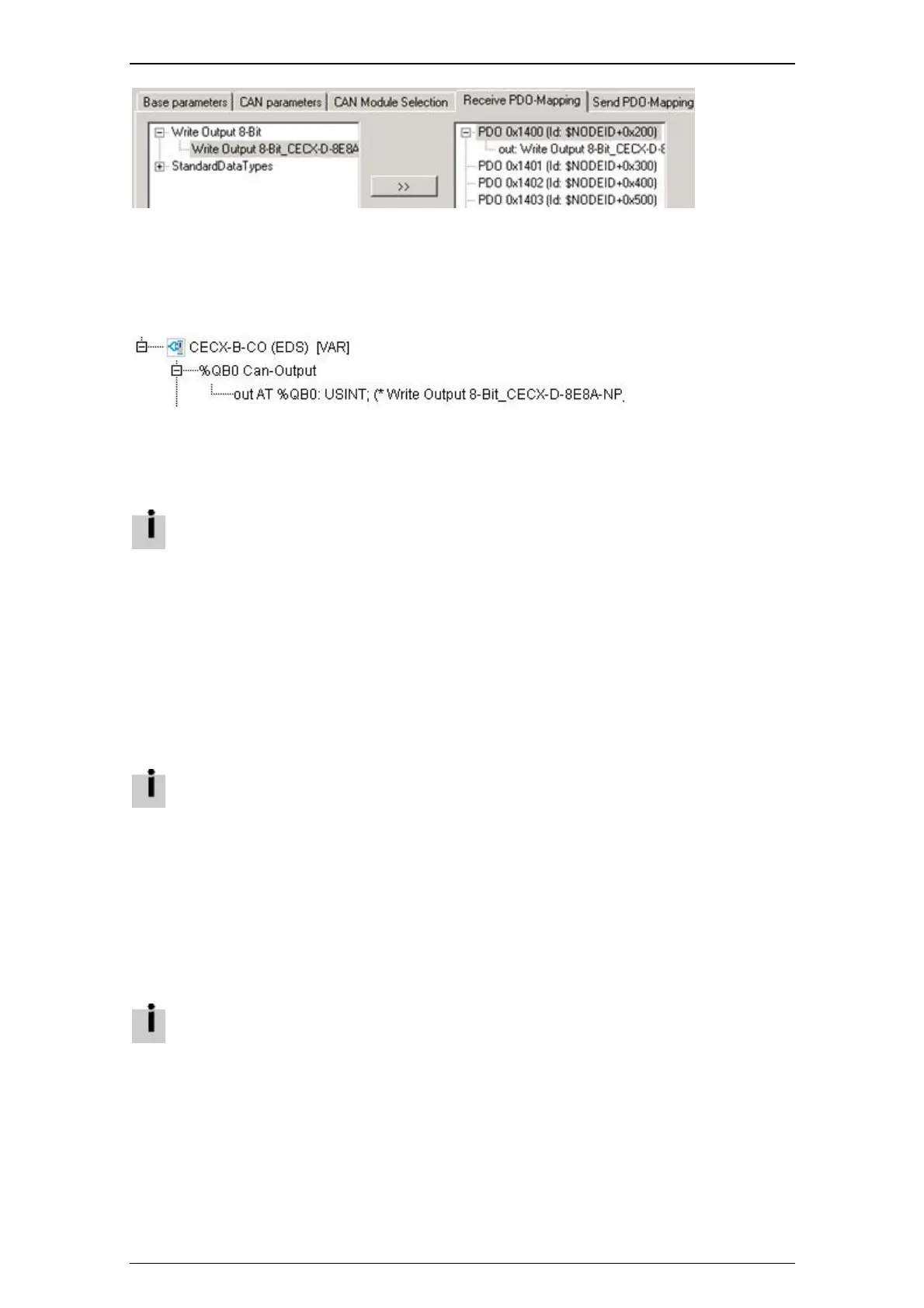
In the system configuration any name can be entered for the created system variable (e.g. out).
In principal the PDO mapping can be done arbitrary. If a PDO is filled, then a message will be shown, and
the next PDO has to be used.
Digital in-/output values are mapped to unsigned system variables (UINT for 16 bit transmission,
USINT for 8 bit). Bit 0 corresponds to the flirst in-/output, bit 1 to the second in-/output, and so
on. E.g. if the outputs 1, 2 and 4 should be set, then the variable out must be set to the value 11
(= 1+2+8).
For more detailed information to PDO mapping please refer to the system manual, chapter 34 - bus link
module CECX-B-CO.
CAN Master [SLOT]
Configuration entry for a CAN Master for operating CAN slaves.
If the CAN master is set on "unused" or on "Businterface", then the libraries "3S_CANDrv.lib",
"3S_CANOpenManager.lib" and "3S_CANOpenMaster.lib" that have been inserted
automatically must be removed manually, otherwise conflicts could arise during the
compilation of the project.
Bus diagnosis
The library BusDag.lib is used for bus diagnosis (see BusDiag.lib).
For this the DEVICENUMBER must be set as follows.
CAN Master that is used first: DEVICENUMBER = 3,
CAN Master that is used second: DEVICENUMBER = 4.
Information on application
A Start telegram is sent to each CAN participant as standard.
However, a "Start All Nodes" telegram, NodeID = 0, can be sent from the IEC application. For
the second CAN master the NodeID = 1.
This requires that at the start-up of the control the application always sets the flag
bUseStartAllNodes of the master once, e.g. as follows (bInit is defined by the application):
IF NOT bInit THEN
pCanOpenMaster[0].bUseStartAllNodes := TRUE;
bInit := TRUE;
CECX-I 35

 Loading...
Loading...







