The Festo_Motion.lib library
31
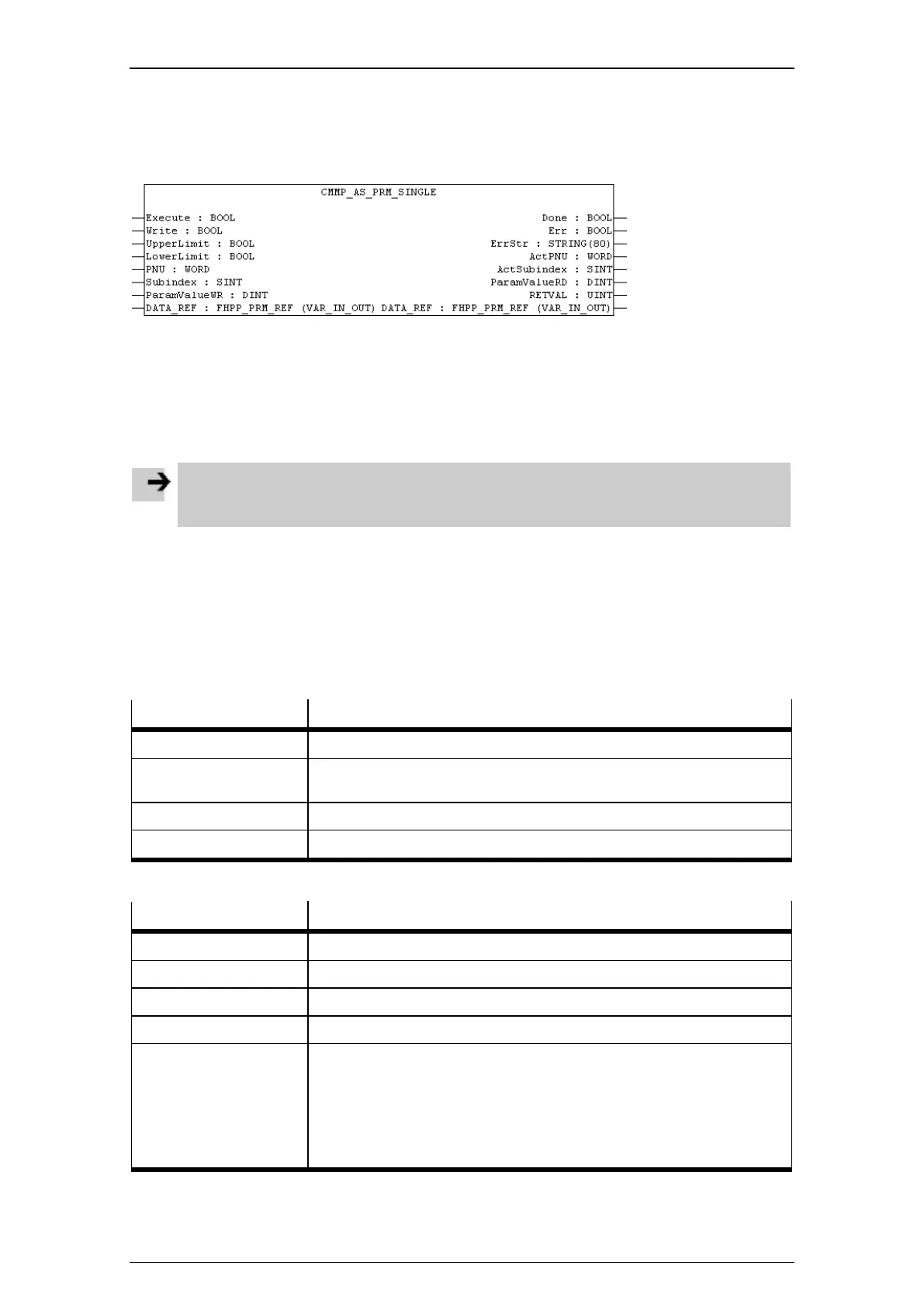
1.10.2 Example for parameterising a Festo motor controller
Festo motor controller CMMP-AS with associated function block CMMP_AS_PRM_SINGLE.
Figure: Example of function block CMMP_AS_PRM_SINGLE
Type CMMP-AS-... motor controllers can be parameterised in all four combinations of operating and
control mode using this block:
– Record selection
– Direct mode position control
– Direct mode force control
– Direct mode velocity control
Note
A description of the parameters according to FHPP supported by the different motor controllers
can be found in the relevant product documentation.
Prerequisites for operational readiness
Additional input signals may be required depending on the motor controller, e.g. at DIN_4, DIN_5, DIN_13,
etc. Refer to the manual for the motor controller being used for more detailed information.
– Motor controller is switched on
– Load voltage is present
– PLC has control priority
Achieving ready status
Action by the user Feedback
-- SupplyVoltagePresent = 1
EnableDrive = 1 DriveEnabled = 1
MC = 1
Stop = 1 Ready = 1
Halt = 1 HaltActive = 0
Read parameters (e.g. homing method)
Action by the user Feedback
Write = 0 No feedback
UpperLimit Read upper limit value
PNU = 1011 No feedback
Subindex = 1 No feedback
Execute = 0->1 Done = TRUE
Err = FALSE
ErrStr = 'no Error'
ActPNU = 1011
ActSubindex = 1
ParamValueRD = ...
RETVAL = 0

 Loading...
Loading...







