COMMISSIONING
152 Service Manual Part No.: 4417340 Revision 1
954 SmartServo FlexLine
Multi-drop mode supported to connect more than one
HART- compatible device on HART bus. For operating the
device in Multi- Drop mode, user needs to select the polling
address to a non-zero value. Making the polling address to a
non-zero value makes the output current mode to
Fixed_4_20_MA (4 mA fixed). Non-zero polling address will
automatically make the output current mode to Fixed_4_20_MA.
All the HART-compatible devices connected over the HART
bus must have different polling addresses. Multi-drop mode is
supported only in Passive mode of loop configuration. When
the output current mode is set to Standard_4_20_MA, the polling
address of the device must be made zero.
When the device is not in multi-drop mode (STANDARD_4_20_MA
mode selected) then the output current follows the changes in
linked PV value.
Scanning of each linked available PV, SV, TV and QV on the
CAN- bus with frequency of 1 Hz. That means all the available
linked variables are scanned every 1 second.
The analog output is refreshed every 1 second, even if there
is no change in the scanned variables. So, the watchdog for
analog output is automatically implemented. If the output is not
refreshed within 45 seconds then a watchdog to analog output
is generated and the output is forced to 0 mA.
During startup, the analog output of the HCI-HAO module is kept
low (< 0.5 mA). This value will be there till initialization takes
place. Once the normal operation starts the output will follow
the linked PV depending upon the output mode setting.
Manual overwrite mechanism. This is a standard FlexConn
func-tionality. Separate configuration and command entities
are defined for this. See 7.3.9.5 - Board Commissioning.
7.3.9.4 Calibration of the HCI-HAO
A calibration provision is given, which is used to accurately map the
analog output between 4 -20 mA using the two range values entered for
Primary Variable.
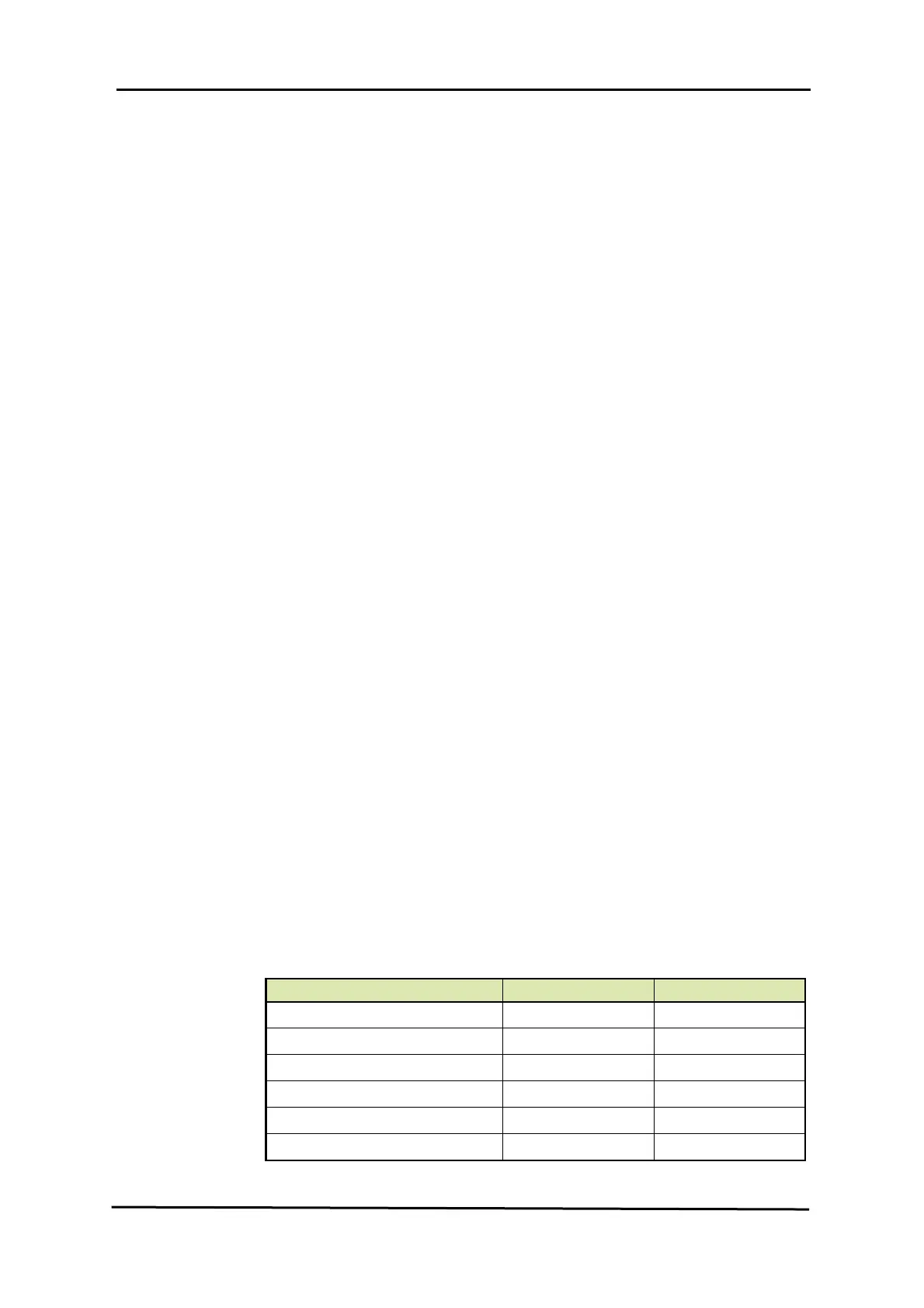
Following table lists all entities required for calibration.
Entity Data Type Type
[Analog Output at 4 mA]
Float non-volatile R/W
[Analog Output at 18 mA]
Float non-volatile R/W
[Calibrate at 4 mA]
Undefined command
[Calibrate at 18 mA]
Undefined command
[Enter Calibration Mode]
Undefined command
[Exit Calibration Mode]
Undefined command
 Loading...
Loading...