INS
GUI User’s Manual
Inertial Labs, Inc
TM
Address: 39959 Catoctin Ridge Street, Paeonian Springs, VA 20129 U.S.A.
Tel: +1 (703) 880-4222, Fax: +1 (703) 935-8377 Website: www.inertiallabs.com
52
orientation and position data are calculated using integration of gyros and
accelerometers data, then at absence of GNSS data the INS errors in
orientation and position calculation are accumulated and increase with time
significantly. At long time of GNSS outage, after “Max INS time” is reached,
INS pauses calculation of position and velocity data but continues
calculation of orientation (heading, pitch, roll) using algorithm of Attitude and
Heading Reference System (AHRS).
Minimum value of the “Max INS time” is 1 sec and it can be changed to 1
sec with arrows or by entering the necessary value from a keyboard. Default
value is set to 120 seconds.
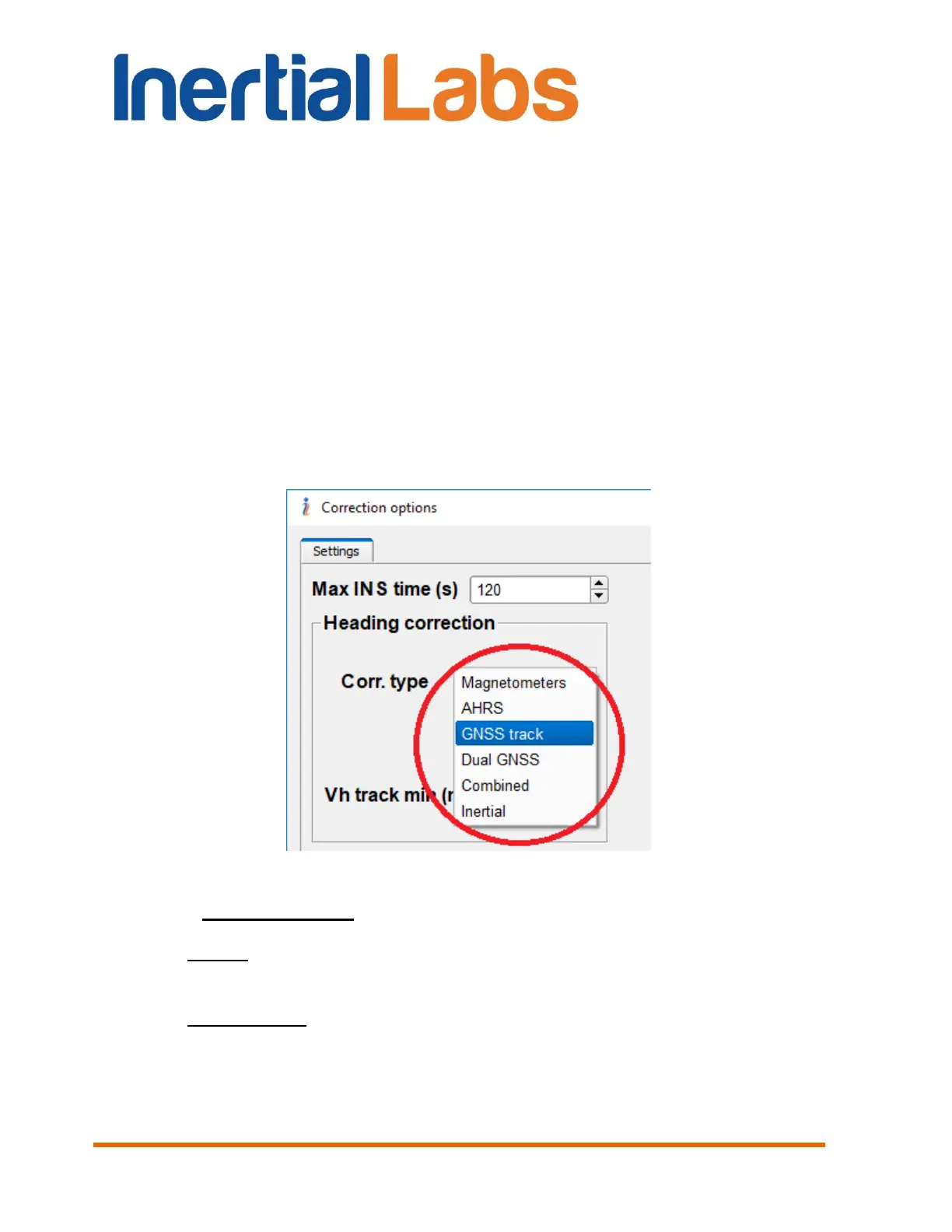
Corr.type – specifies data used for INS heading correction. There
are six variants in drop-down list (see Fig. 4.25):
Fig. 4.25
Magnetometers – using magnetic heading as reference;
AHRS – using gyro-magnetic heading calculated using AHRS
algorithm;
GNSS track – using GNSS track angle as heading reference for
INS correction. This improves INS heading accuracy at bad
magnetic environment for some applications like car, fixed wing
aircraft and other vehicles that don't move sideways;

 Loading...
Loading...