Training Guide Course No. 196514
Level 2 Maintenance, X-1000 Series Dispensing Systems 2-42 P/N 196515 (Revision A)
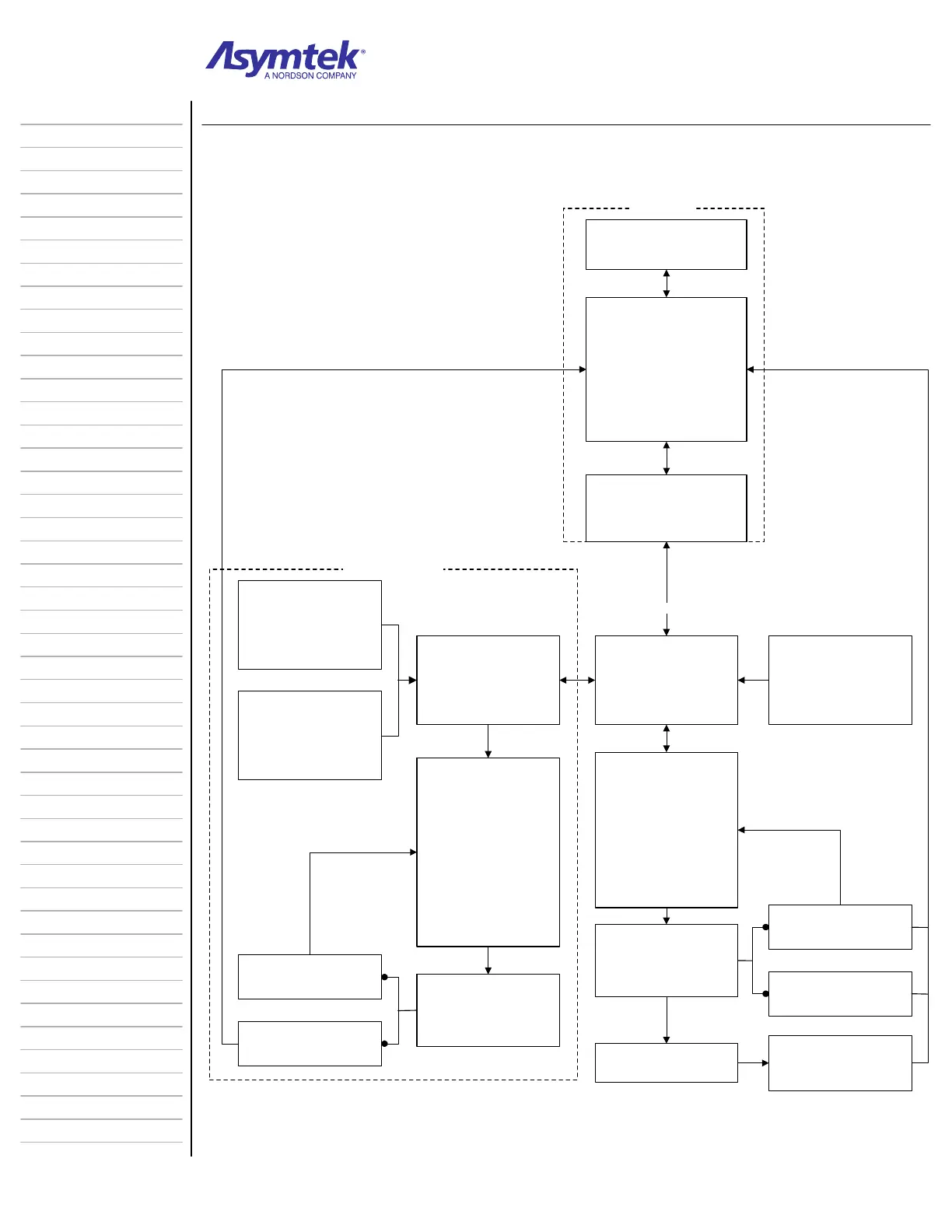
Diagram Sheet 2-5-3
Dispensing Head Finds Home
FmNT Command
A program command is issued to the
FmNT software.
PMAC Card
y
Receives FmNT command to move
Dispense Head to specific position.
y
Sends low-voltage direction and
power level output signals to the
XYZ Servo Amplifiers.
y
Receives feedback from:·
¾
XY Linear Encoders (position)·
¾
XYZ Rotary Encoders (velocity)
y
Calculates how much power should
be delivered to Servo Motors.
Main Interface PWA
y
Is an intermediate step as
information is communicated
between the PMAC Card and the
XY and Z Servo Interface PWAs.
XY Servo Interface PWA
y
Relays PMAC signals to:·
¾
X and Y Servo Amplifiers·
¾
Z Servo Interface PWA
y
Relays the Y Home Sensor
signal to the PMAC.
XY Servo Amplifier
y
Receives low-voltage motor
direction and power signals
from the PMAC.
y
Amplifies PMAC signals to
regulate power level to the XY
Servo Motors to cause speed
or directional changes.
y
Receives and interprets Hall
Sensor feedback indicating
motor direction.
y
Regulates power to motor
windings to cause motor to
move in the desired direction.
Computer
Servo Interconnect Cables
XY Servo Motors
y
Receive power from XYServo
Amplifiers.
y
Turn cable pulleys to move the
Dispensing Head in the XY
axes.
Dispensing Head Moves
Y Home Sensor
y
Optical switch on Y-axis that
senses when the Dispensing
Head has reached Y home
position. Information is routed
through the Servo Interface
PWA and reported to PMAC
X Home Sensor
y
Optical switch on X-axis that
senses when the Dispensing
Head has reached X home
position. Information is routed
through the Servo Interface
PWA and reported to PMAC.
Z Servo Interface PWA
y
Relays PMAC signals from the
XY Servo Interface PWA to
the Z Servo Amplifier·
y
Relays X and Z Home Sensor
signals to the PMAC.
Z Home Sensor
y
Optical switch on Z-axis that
senses when the Dispensing
Head has reached Z home
position. Information is routed
through the Servo Interface
PWA and reported to PMAC.
Z Servo Amplifier
y
Receives PMAC low-voltage
motor direction and power
signals through the Z Servo
Interface PWA..
y
Amplifies PMAC signals to
regulate power level to the Z
Servo Motor in order to cause
speed or directional changes.
y
Receives and interprets Hall
Sensor feedback that indicates
direction motor is turning.
y
Regulates power to motor
windings to cause motor to
move in the desired direction.
XY Linear Encoders
y
Supply Dispensing Head
position information on a
constant basis to the PMAC.
Hall Sensors
y
Sense XY Servo Motor
direction and report it to Servo
Amplifier.
XY Rotary Encoders
y
Supply velocity/acceleration
information to the PMAC
Z Servo Motor
y
Receives power from the Z
Servo Amplifier
y
Turns the drive gear (pinion),
that moves the Dispensing
Head in the Z-axis
Hall Sensors
y
Sense Servo Motor direction
and report it to Servo Amplifier.
Z Rotary Encoder
y
Supplies velocity/acceleration
information to the PMAC.
Dispensing Head

 Loading...
Loading...




