6 - 11
6 Basic Control Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
6-3 Cyclic Synchronous Position Mode
6
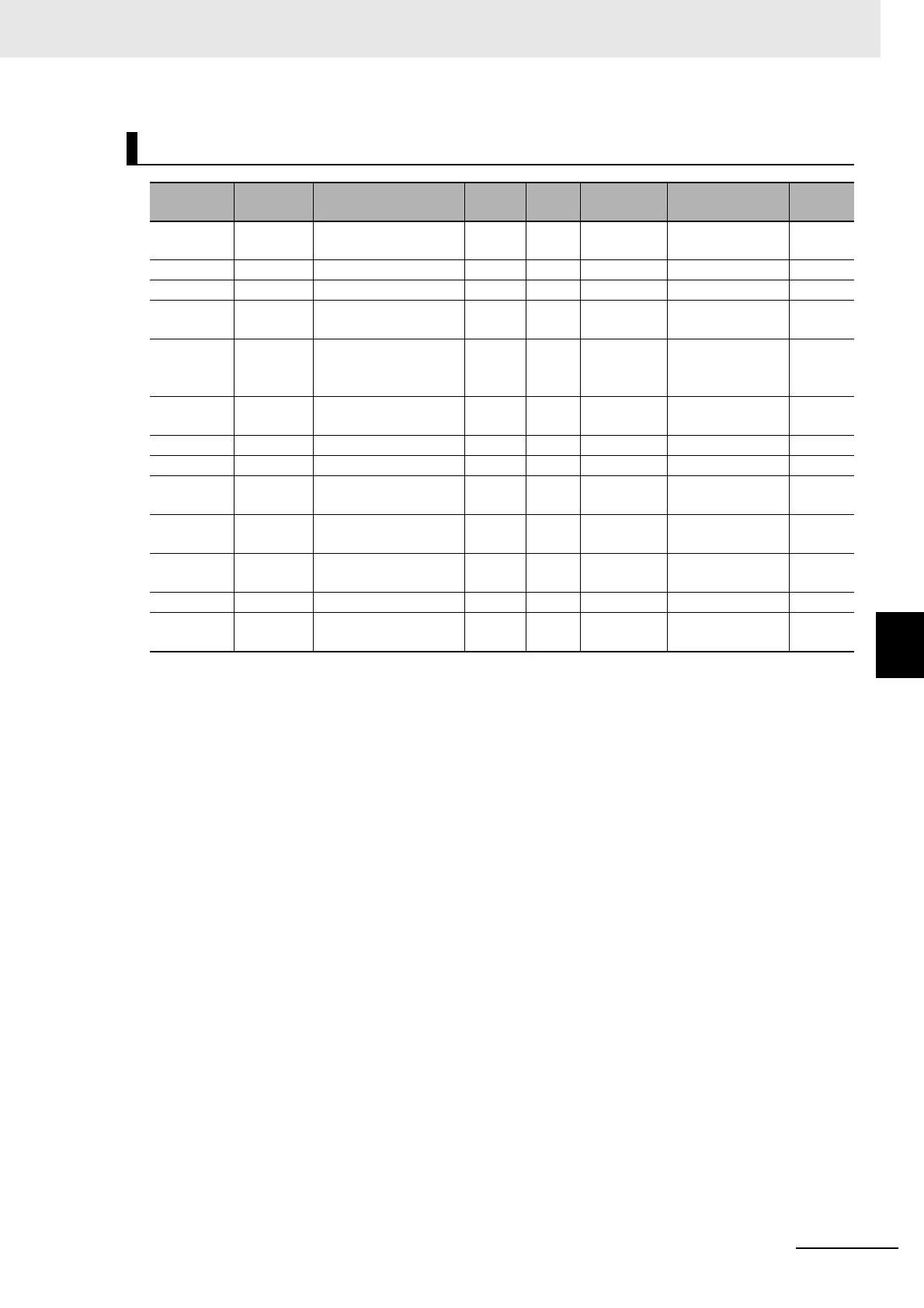
Related Objects
Index
(hex)
Subindex
(hex)
Name Access Size Unit Setting range
Default
setting
6040 00 Controlword RW U16 --- 0 to FFFF hex 0000
hex
6041 00 Statusword RO U16 --- --- ---
6060 00 Modes of operation RW INT8 --- 0 to 10 0
6064 00 Position actual value RO INT32 Command
unit
--- ---
6065
*1
*1. Following error window can be set to between 0 and 2,147,483,647, or 4,294,967,295. If the object is set to
4,294,967,295, the detection of Excessive Position Deviation Error will be disabled. If it is set to 0, an Exces-
sive Position Deviation Error will always occur. If the set value is between 2,147,483,647 and 4,294,967,294,
it is treated as 2,147,483,647.
00 Following error win-
dow
RW U32 Command
unit
0 to
2,147,483,647 or
4,294,967,295
84,000,
000
606C 00 Velocity actual value RO INT32 Command
unit/s
--- ---
6072 00 Max torque RW U16 0.1% 0 to 5,000 5,000
6077 00 Torque actual value RO INT16 0.1% --- ---
607A 00 Target position RW INT32 Command
unit
-2,147,483,648 to
2,147,483,647
0
60B0 00 Position offset RW INT32 Command
unit
-2,147,483,648 to
2,147,483,647
0
60B1 00 Velocity offset RW INT32 Command
unit/s
-2,147,483,648 to
2,147,483,647
0
60B2 00 Torque offset RW INT16 0.1% -5,000 to 5,000 0
60F4 00 Following error actual
value
RO INT32 Command
unit
--- ---

 Loading...
Loading...

