8 Safety Function
8 - 6
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
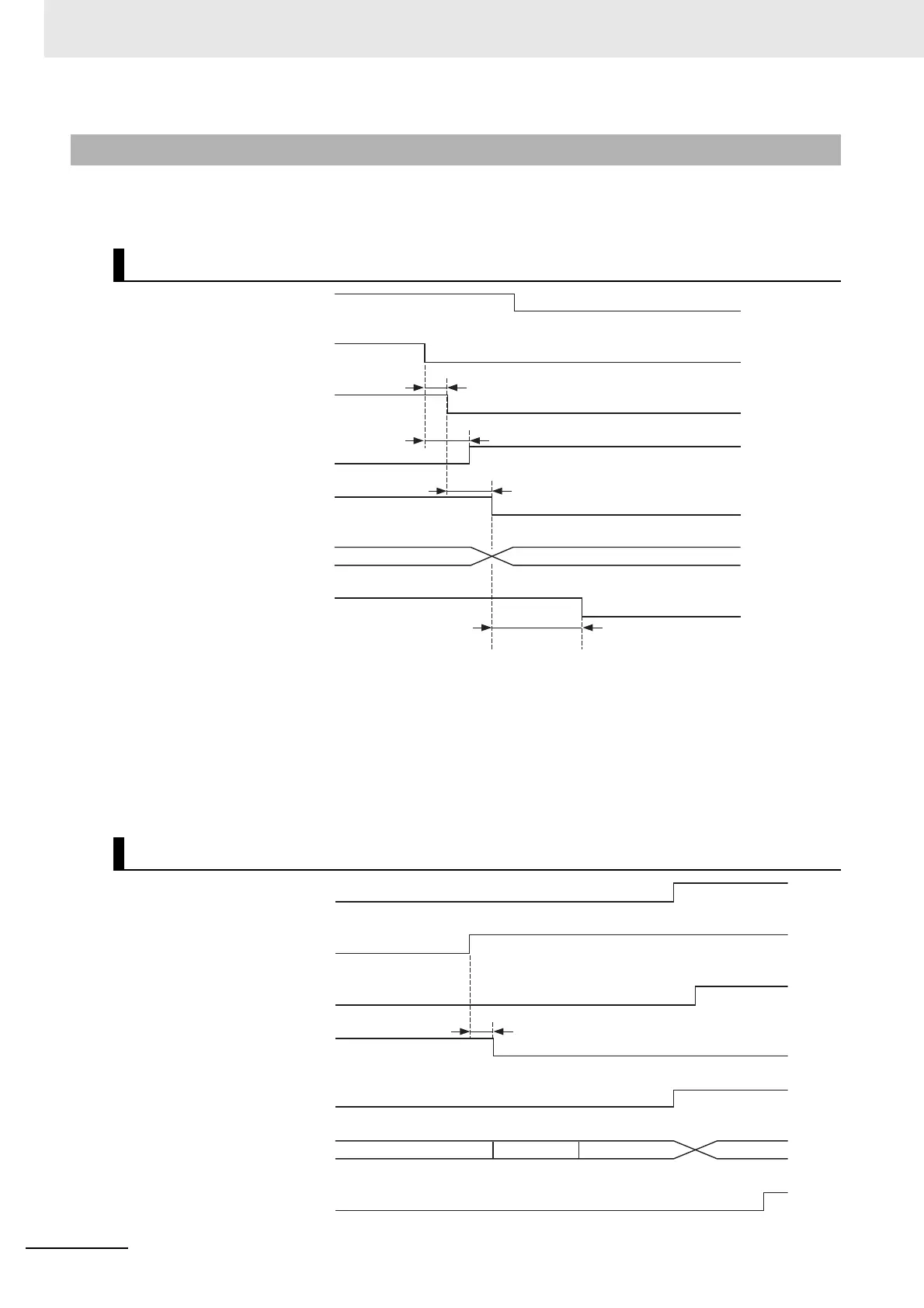
This section gives the timing charts to show the operation timing to a safe state as well as the timing of
return from safe state.
The Servo Drive goes into the STO status when either safety input 1 or 2 turns OFF.
The dynamic brake operates according to the setting of the Stop Selection – Shutdown Option Code
(3B20-01 hex).
8-2-2 Operation Example
Operation Timing to a Safe State
Timing of Return from Safe State
Normal status
off on
Motor power status
on off
6 ms max.
15 ms max.
PDS state
Operation enabled Switched on disabled
Brake Interlock
Output (BKIR)
Brake released
4610-02 hex
4610-03 hex
Brake held
T
STO status
Servo ON/OFF
Servo ON
Dynamic brake
DB released
Servo OFF
DB applied
T is determined by a set value of the following objects, whichever comes earlier.
: Brake Interlock Output – Timeout at Servo OFF
: Brake Interlock Output – Threshold Speed at Servo OFF
Reaction time: 5 ms max.
Safety input 1
EDM output
Safety input 2
STO status Normal status
on off
off on
6 ms max.
Switched on disabled Switched on Operation Ready to
switch on enabled
Motor power status
PDS state
Brake Interlock
Output (BKIR)
Brake held
DB released
DB applied
Servo ON/OFF Servo OFF Servo ON
Dynamic brake
Safety input 1
EDM output
Safety input 2

 Loading...
Loading...

