9 Details on Servo Parameters
9 - 54
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
Sets the torque limit function.
• Selects the torque limit switching method.
• When 1 or 2 is set, positive and negative torque limit values vary with state of the torque limit input
(PCL/NCL) and Controlword (P_CL/N_CL).
• When the maximum torque value is smaller than the other torque limit values, it is used as the limit
value.
Description of Set Values
• Sets the maximum torque limit value. The function of this object is the same as the Max torque
(6072 hex). Set this object when you use a limit value without mapping 6072 hex to a PDO.
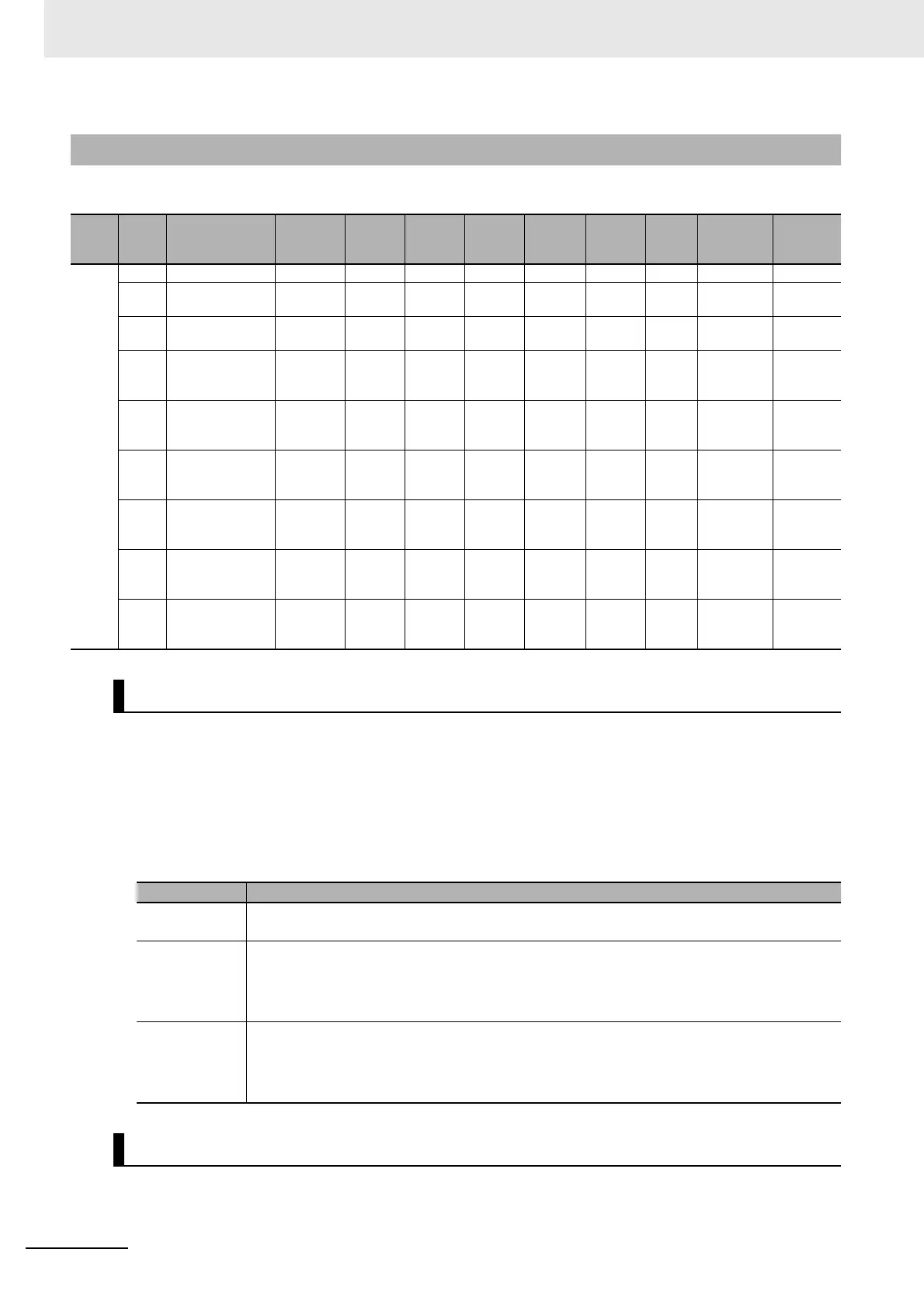
9-5-7 3330 hex: Torque Limit
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes of
opera-
tion
3330 --- Torque Limit --- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 81 hex --- 1 byte
(U8)
RO --- --- ---
01 Switching Selec-
tion
0 to 2 --- 0 A 4 bytes
(INT32)
RW --- --- cst
02 Max Torque 0 to 5,000 0.1% 5,000 A 2 bytes
(U16)
RW - - csp, csv,
cst, pp,
pv, hm
03 Positive Torque
Limit Value
0 to 5,000 0.1% 5,000 A 2 bytes
(U16)
RW --- --- csp, csv,
cst, pp,
pv, hm
04 Negative Torque
Limit Value
0 to 5,000 0.1% 5,000 A 2 bytes
(U16)
RW --- --- csp, csv,
cst, pp,
pv, hm
05 Positive Torque
Limit Value 2
0 to 5,000 0.1% 5,000 A 2 bytes
(U16)
RW --- --- csp, csv,
cst, pp,
pv, hm
06 Negative torque
limit value 2
0 to 5,000 0.1% 5,000 A 2 bytes
(U16)
RW - - csp, csv,
cst, pp,
pv, hm
81 Status --- --- --- --- 4 bytes
(INT32)
RO --- --- csp, csv,
cst, pp,
pv, hm
Subindex 01 hex: Switching Selection
Set value Description
0 Switching by PCL/NCL signal is not allowed. Use the Positive torque limit value and Negative
torque limit value.
1 Use the Positive Torque Limit Value 2 when both of the torque limit input (PCL) and Control-
word (P_CL) are OFF, and the Positive Torque Limit Value for the other combinations.
If both the torque limit input (NCL) and Controlword (N_CL) are OFF, the Negative torque limit
value 2 is used. In other cases, the Negative torque limit value is used.
2 Use the Positive Torque Limit Value when both of the torque limit input (PCL) and Controlword
(P_CL) are OFF, and the Positive Torque Limit Value 2 for the other combinations.
If both the torque limit input (NCL) and Controlword (N_CL) are OFF, the Negative torque limit
value is used. In other cases, the Negative torque limit value 2 is used.
Subindex 02 hex: Max Torque

 Loading...
Loading...

