7 Applied Functions
7 - 18
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
When the software position limit function is enabled in Software Position Limit - Enable Selection
(3B11-01 hex), if the present position exceeds the specified movement range, the Servo Drive stops the
Servomotor according to the method specified in Stop Selection (3B11-02 hex).
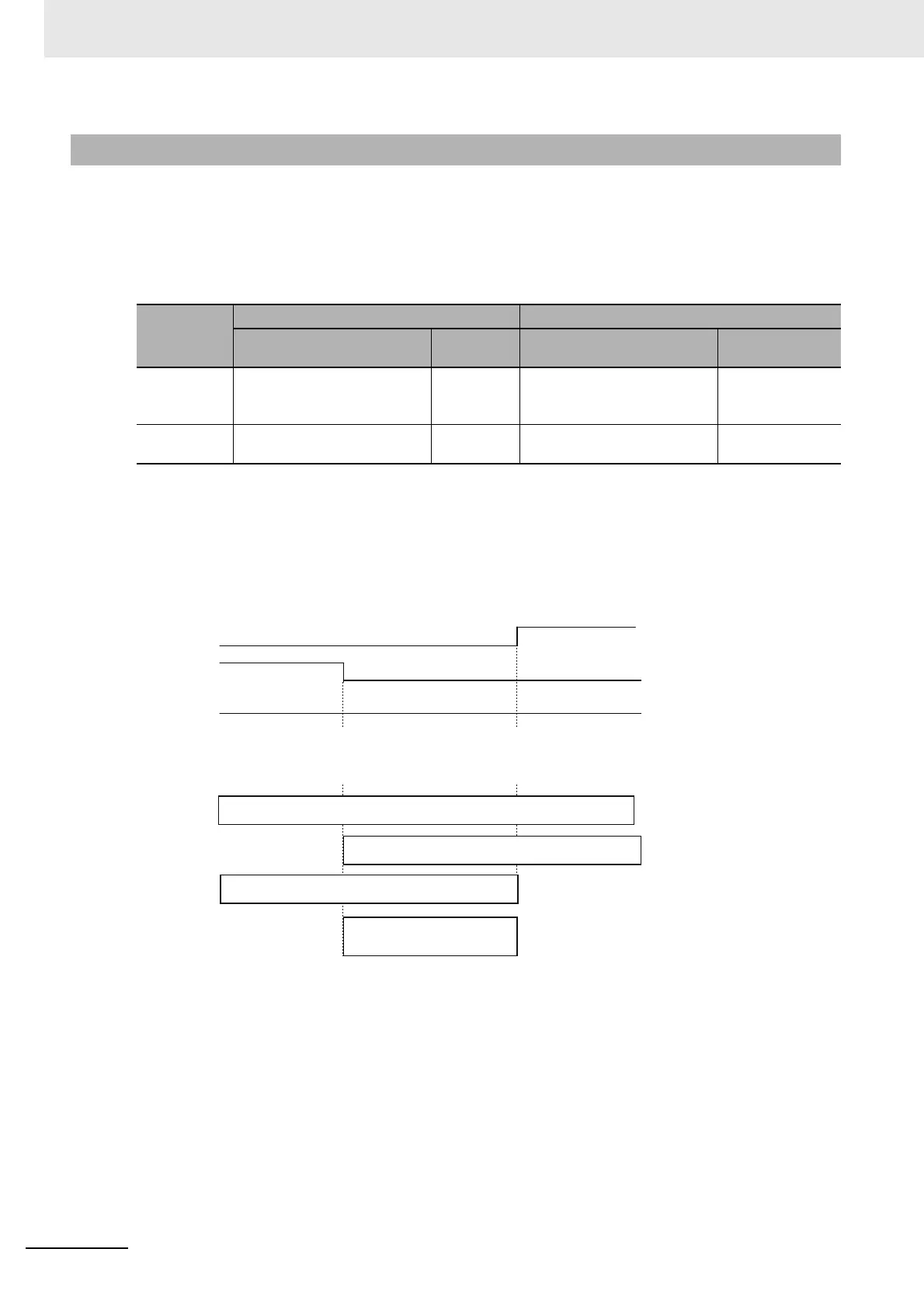
The value set in Enable Selection (3B11-01 hex) determines the movement range as follows.
Note that the Servomotor does not stop if Max Position Limit (3B11-04 hex) is equal to or smaller than
Min Position Limit (3B11-03 hex).
If the Servomotor stops outside the allowable operating range, commands only for the direction of the
movement range are accepted.
Positive Software Limit (PSOT) and Negative Software Limit (NSOT) of Function Status (3000-81 hex)
give the status regardless of the setting in Enable Selection (3B11-01 hex).
7-4-3 Description of Operation
Stop Selec-
tion
set value
During deceleration
*1
*1. During deceleration means the period in which the running motor decelerates and its speed reaches 30 r/min
or lower. Once the motor speed reaches 30 r/min or lower and the operation changes to after stopping, the
following operation conforms to the description for the state after stopping, regardless of the motor speed.
After stopping
Deceleration method
Following
error
State after stopping Following error
2 The deceleration stop torque
is used.
*2
*2. When the deceleration stop torque is used to stop the Servomotor, the operation direction may be reversed if
the inertia is small and the operation speed is slow.
Clear Lock at the stop position Cleared at the
stop and held
after stopping
4
*3
*3. If you set Stop Selection to 4, a Software Limit Exceeded (Error No. 34.1) occurs when the movement range
is exceeded.
Stop according to the setting
of Fault reaction option code
--- Stop according to the setting
of Fault reaction option code
---
Min Position
Limit
Max Position
Limit
Positive direction Negative direction
PSOT
NSOT
Movement range for 0: Positive: Disabled, Negative: Disabled
Movement range for
1: Positive: Disabled, Negative: Enabled
Movement range for
2: Positive: Enabled, Negative: Disabled
Movement range for
3: Positive: Enabled,
Negative: Enabled

 Loading...
Loading...

