7 - 47
7 Applied Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
7-13 Dynamic Brake
7
7-13-3 Description of Operation
This section describes the dynamic brake operation for each function.
For the drive prohibition function, you can select the dynamic brake as a method to stop the Servomo-
tor when Positive Drive Prohibition Input (POT) or Negative Drive Prohibition Input (NOT) is active.
Use the Drive Prohibition - Stop Selection (3B10-02 hex) for setting.
You can select the dynamic brake as a method to stop the Servomotor when the present position
exceeds the specified movement range.
Use the Software Position Limit - Stop Selection (3B11-02 hex) for setting.
You can select the dynamic brake as a method to stop the Servomotor when the main circuit power is
turned OFF (PDS state machine = Shutdown). Also, you can select the dynamic brake for the operation
after stopping.
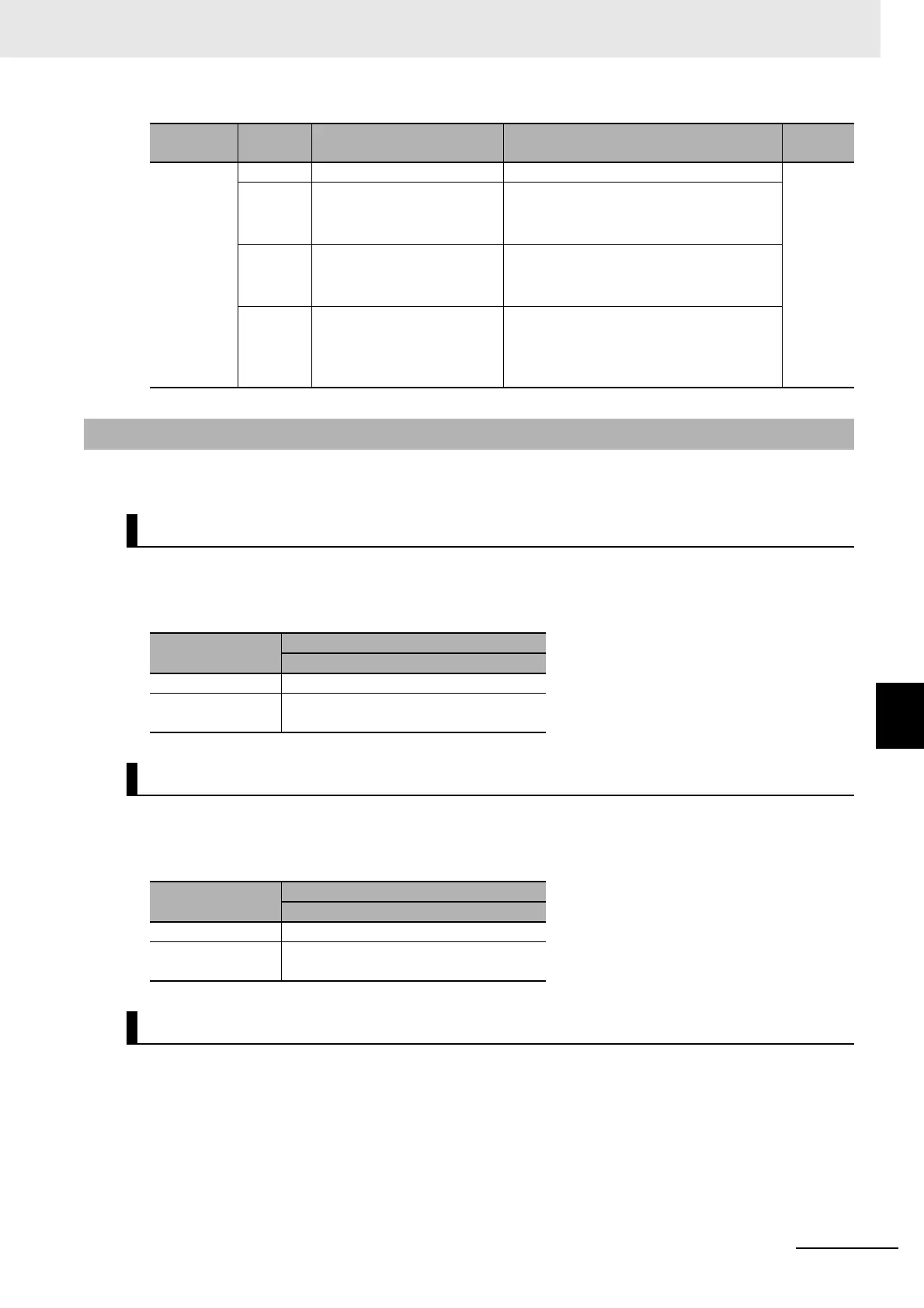
Use the Stop Selection - Shutdown Option Code (3B20-01 hex) for setting.
3B20
---
Stop Selection
---
P. 9 - 6 3
01 Shutdown Option Code Selects the operation for the time when the
PDS state machine is Shutdown.
Mirror object of 605B hex
02 Disable Operation Option
Code
Selects the operation for the time when the
PDS state machine is Disable Operation.
Mirror object of 605C hex
04 Fault Reaction Option Code Selects the operation for the time when an
error occurred in the Servo Drive (PDS
state = Fault reaction active).
Mirror object of 605E hex
7-13-3 Description of Operation
Drive Prohibition
Stop Selection
set value
During deceleration
Deceleration method
2 The deceleration stop torque is used.
4 Stop according to the setting of Fault
reaction option code
Software Position Limit
Stop Selection
set value
During deceleration
Deceleration method
2 The deceleration stop torque is used.
4 Stop according to the setting of Fault
reaction option code
Main Circuit Power OFF
Index (hex)
Subin-
dex (hex)
Name Description
Refer-
ence

 Loading...
Loading...

