7 Applied Functions
7 - 48
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
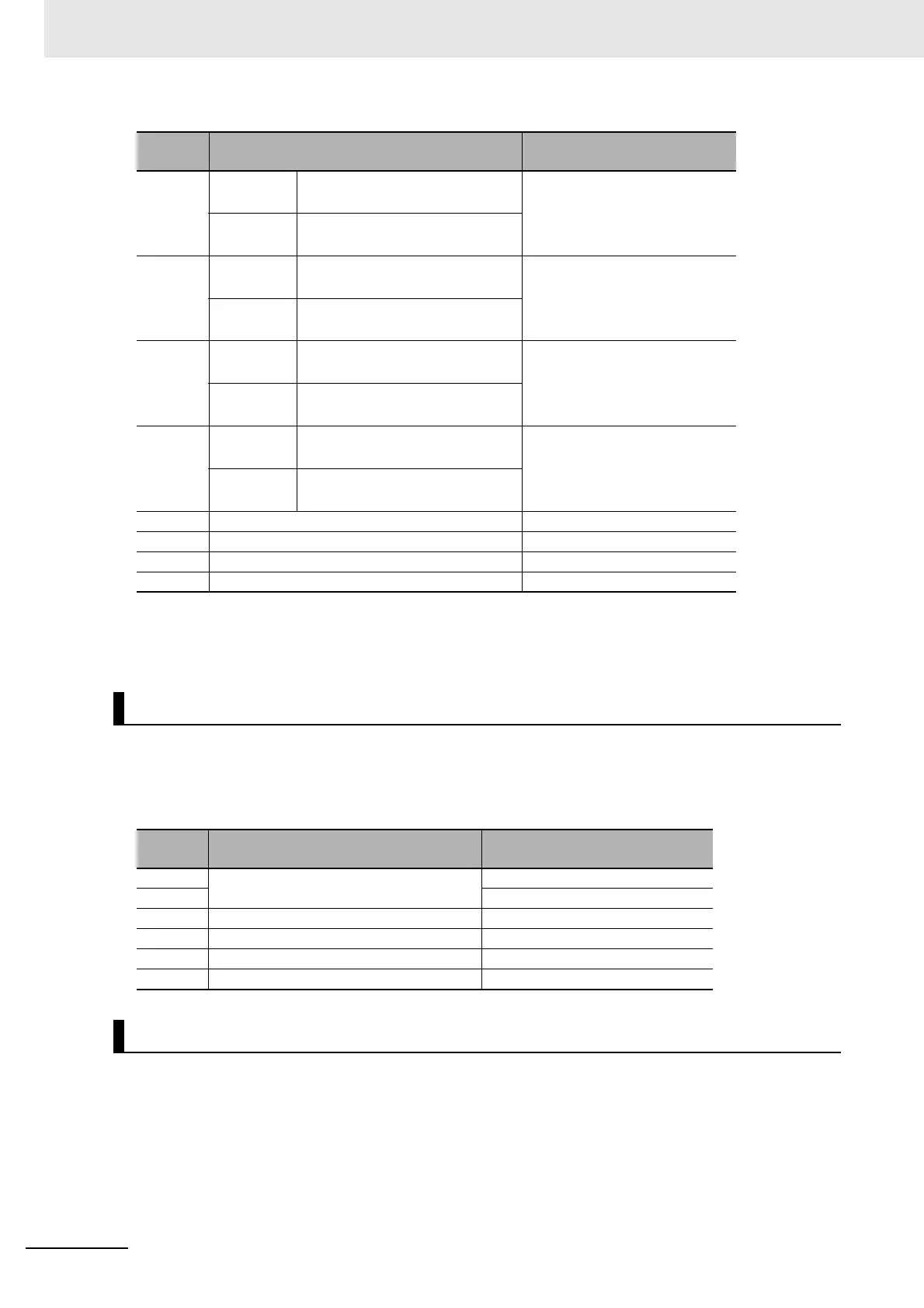
You can select the dynamic brake as a method to stop the Servomotor when the Servo is turned OFF
(PDS state machine = Disable operation). Also, you can select the dynamic brake for the operation
after stopping.
Use the Stop Selection - Disable Operation Option Code (3B20-02 hex) for setting.
You can select the dynamic brake as a method to stop the Servomotor when an error occurs (PDS state
= Fault reaction active). Also, you can select the dynamic brake for the operation after stopping.
Use the Stop Selection - Fault Reaction Option Code (3B20-04 hex) for setting.
Set
value
Deceleration operation Operation after stopping
-7 Operation
A
*1
*1. The Servomotor stops according to the setting of Operation B while in an STO status or
when the P-N Voltage drops to the specified value or lower. In other cases, the Servomotor
decelerates to stop according to the setting of Operation A.
Deceleration stop (The decelera-
tion stop torque is used.)
Free
Operation
B
*1
Free-run
-6 Operation
A
*1
Deceleration stop (The decelera-
tion stop torque is used.)
Free
Operation
B
*1
Dynamic brake operation
-5 Operation
A
*1
Deceleration stop (The decelera-
tion stop torque is used.)
Dynamic brake operation
Operation
B
*1
Free-run
-4 Operation
A
*1
Deceleration stop (The decelera-
tion stop torque is used.)
Dynamic brake operation
Operation
B
*1
Dynamic brake operation
-3 Dynamic brake operation Free
-2 Free-run Dynamic brake operation
-1 Dynamic brake operation Dynamic brake operation
0 Free-run Free
Servo OFF
Set
value
Deceleration operation Operation after stopping
-6 Deceleration stop (The deceleration stop
torque is used.)
Free
-4 Dynamic brake operation
-3 Dynamic brake operation Free
-2 Free-run Dynamic brake operation
-1 Dynamic brake operation Dynamic brake operation
0 Free-run Free
Occurrence of Error

 Loading...
Loading...

