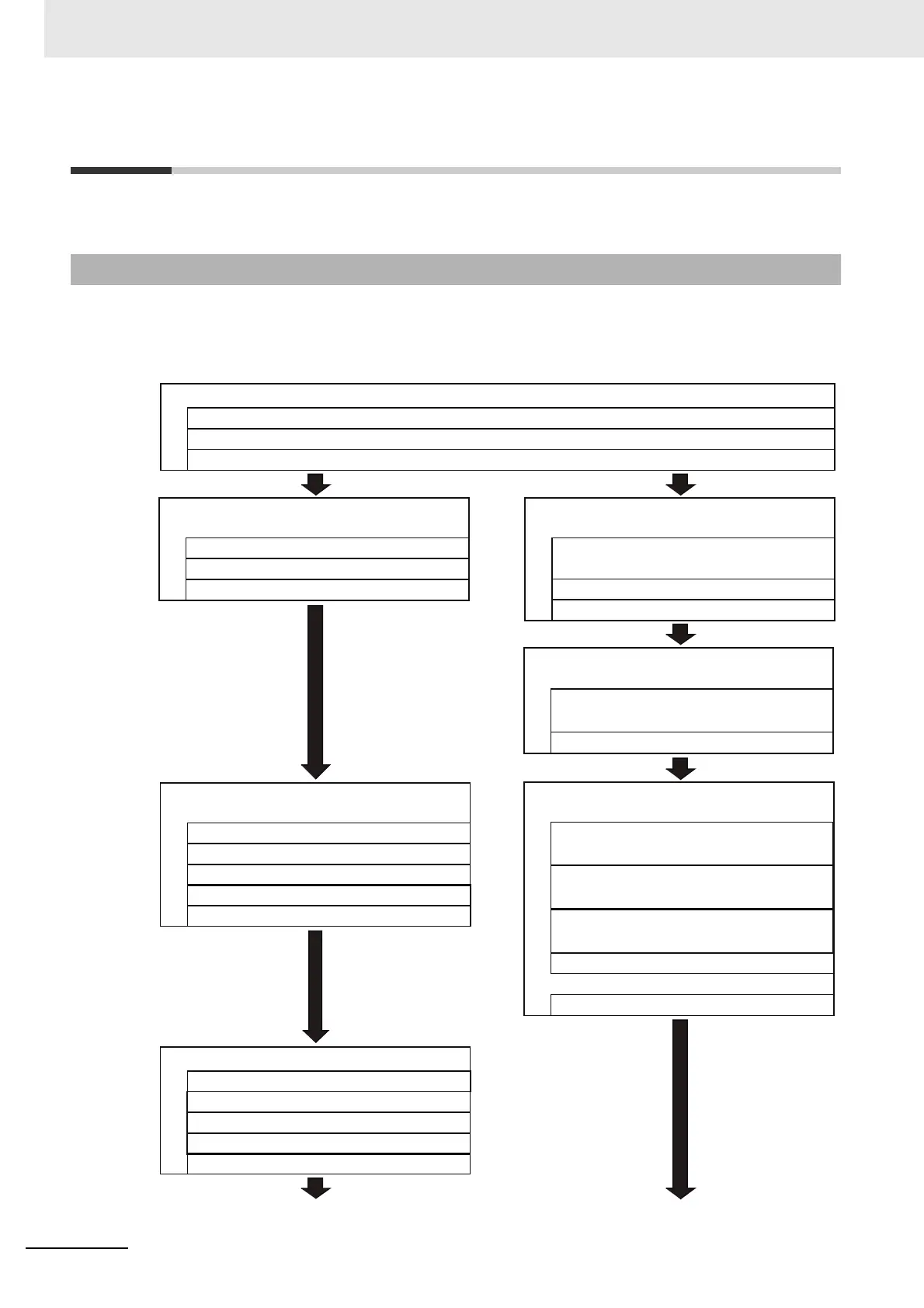
STEP 1 System Design
STEP 1-1 Determining safety measures based on risk assessment
STEP 1-2 Selecting standard devices, Servo Drive, Servomotor, and safety devices
STEP 1-3 Designing interface between standard control and safety control
STEP 2 Software and hardware design for
standard control
STEP 2-1 Designing I/O and processing
STEP 2-2 Designing tasks
STEP 2-3 Designing user programs
STEP 4 Calculation and verification of safety
control responsivity
STEP 4-1 Calculating safety reaction time
and safety distance
STEP 3 Software and hardware design for
safety control
STEP 3-1 Determining wiring for communications,
power supply, and connection with external I/O devices
STEP 3-2 Designing I/O and processing
STEP 3-3 Designing safety programs
STEP 4-2 Verifying specification requirement satisfaction
STEP 5 Software setting and programming for
standard control
STEP 5-1 Creating project
STEP 5-2 Creating slave and unit configuration
STEP 6 Software setting and programming for
safety control
STEP 5-3 Controller settings
STEP 5-4 Programming
STEP 5-5 Offline debugging
STEP 6-1 Creating safety control system
configuration
STEP 6-4 Assigning device variables to I/O ports
STEP 6-5 Programming
STEP 6-6 Offline debugging
STEP 6-2 Checking/setting safety process
data communications
STEP 6-3 Assigning devices to safety
I/O terminal
STEP 7 Servo Drive setting, adjustment, and operation check
STEP 7-1 Installation and mounting
STEP 7-2 Wiring and connections
STEP 7-3 Device setting
STEP 7-4 Test run
STEP 7-5 Adjustment

 Loading...
Loading...

