7 - 21
7 Applied Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
7-5 Backlash Compensation
7
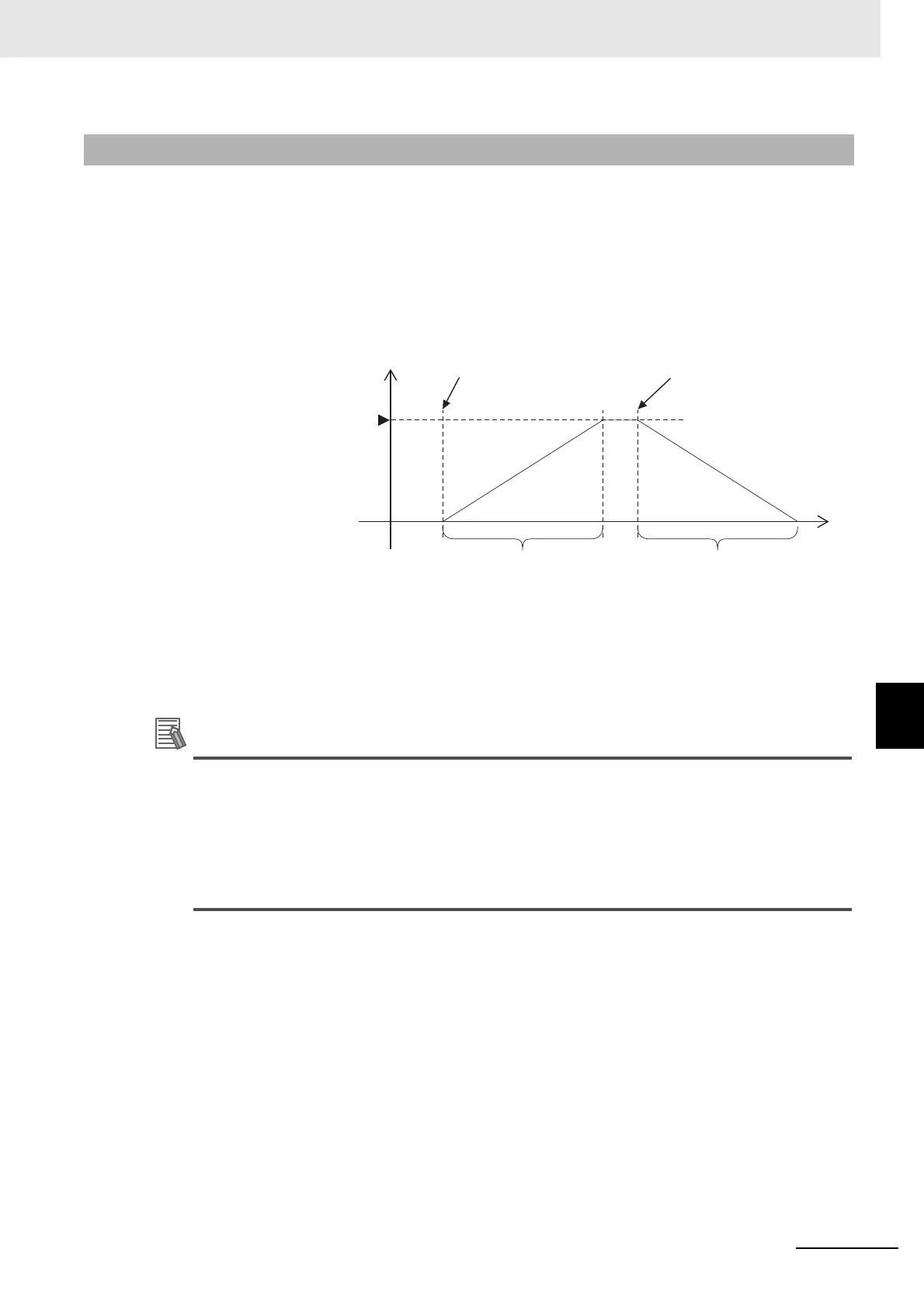
7-5-3 Description of Operation
When the first operation after Servo ON is performed in the direction specified in Backlash Compen-
sation Selection (3001-02 hex), position data is compensated by Backlash Compensation Amount.
After that, compensation is executed each time the operation direction is reversed.
The compensation is performed for the target position and the present position. The software position
limit function and the latch function are performed based on the position data after compensation.
Backlash Compensation is performed as follows:
To determine the actual position of the Servomotor, the Servomotor position data acquired via Ether-
CAT communications is offset by the Backlash Compensation Amount.
If the Servo is turned OFF when backlash compensation is performed, the position data is reset to the
value that does not contain Backlash Compensation Amount. The backlash compensation is performed
as described above when the Servo is turned ON again.
Conditions for Clearing Backlash Compensation
• When the following error is reset:
This includes when the Servo is OFF, and when following error is cleared due to the drive
prohibition input.
• When the position data is initialized, except for the homing operation in Homing mode (hm):
This includes Absolute Encoder Setup (4510-F1 hex).
7-5-3 Description of Operation
Time
Backlash Compensation
Time Constant
Compensation amount (position)
Backlash Compensation Amount
Operation start
Operation start in reverse direction
Backlash Compensation
Time Constant

 Loading...
Loading...

