Appendices
A - 66
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
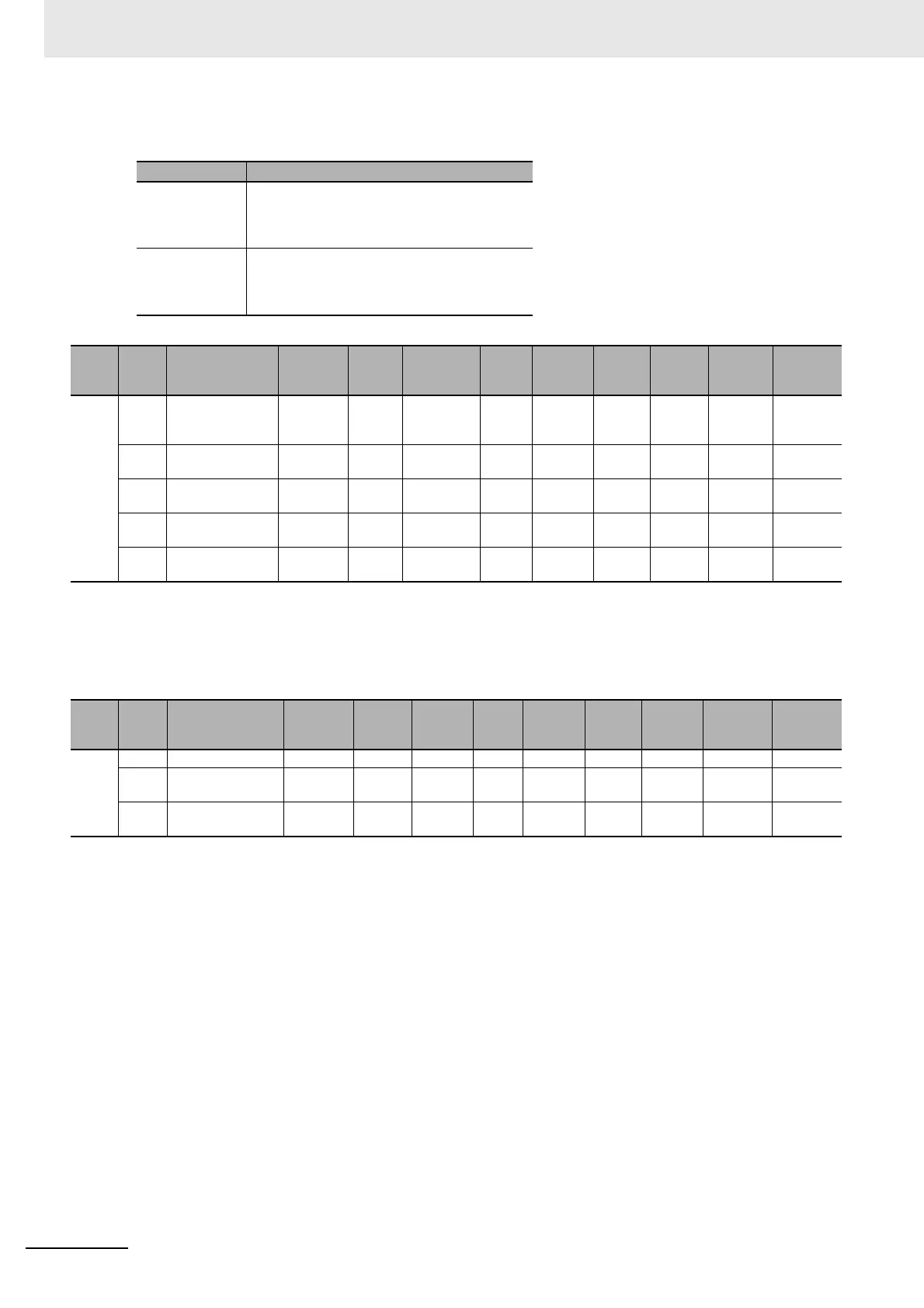
Description of Reading and Writing
• This object is used to send safety process data.
• Subindex 01 hex FSoE Slave CMD gives the command which is sent from the slave.
• Subindex 02 hex FSoE Slave Conn_ID gives the connection ID which is sent from the slave.
• Subindex 03 hex FSoE Slave CRC_0 gives the cyclic redundancy code which is sent from the slave.
• This object indicates that the safety connection is in execution.
• When the value is 1, the safety connection is in execution.
Access Description
Read Gives the STO status.
0: Normal status
1: STO status
Write Issues the STO command.
0: Activate STO
1: Reset STO
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
E600 --- FSoE Slave
Frame Elements
Axis Ch1
--- --- --- --- --- --- --- Possible ---
00 Number of entries --- --- 03 hex --- 1 byte
(U8)
RO --- --- ---
01 FSoE Slave CMD --- --- --- --- 1 byte
(U8)
RO TxPDO --- ---
02 FSoE Slave Con-
n_ID
--- --- --- --- 2 bytes
(U16)
RO TxPDO --- ---
03 FSoE Slave
CRC_0
--- --- --- --- 2 bytes
(U16)
RO TxPDO --- ---
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
E601 --- Safety input 1 --- --- --- --- --- --- --- Possible ---
00 Number of entries --- --- 01 hex --- 1 byte
(U8)
RO --- --- ---
01 Safety Connec-
tion Status
--- --- --- --- 1 bit
(BOOL)
RO TxPDO --- ---

 Loading...
Loading...

