Appendices
A - 146
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
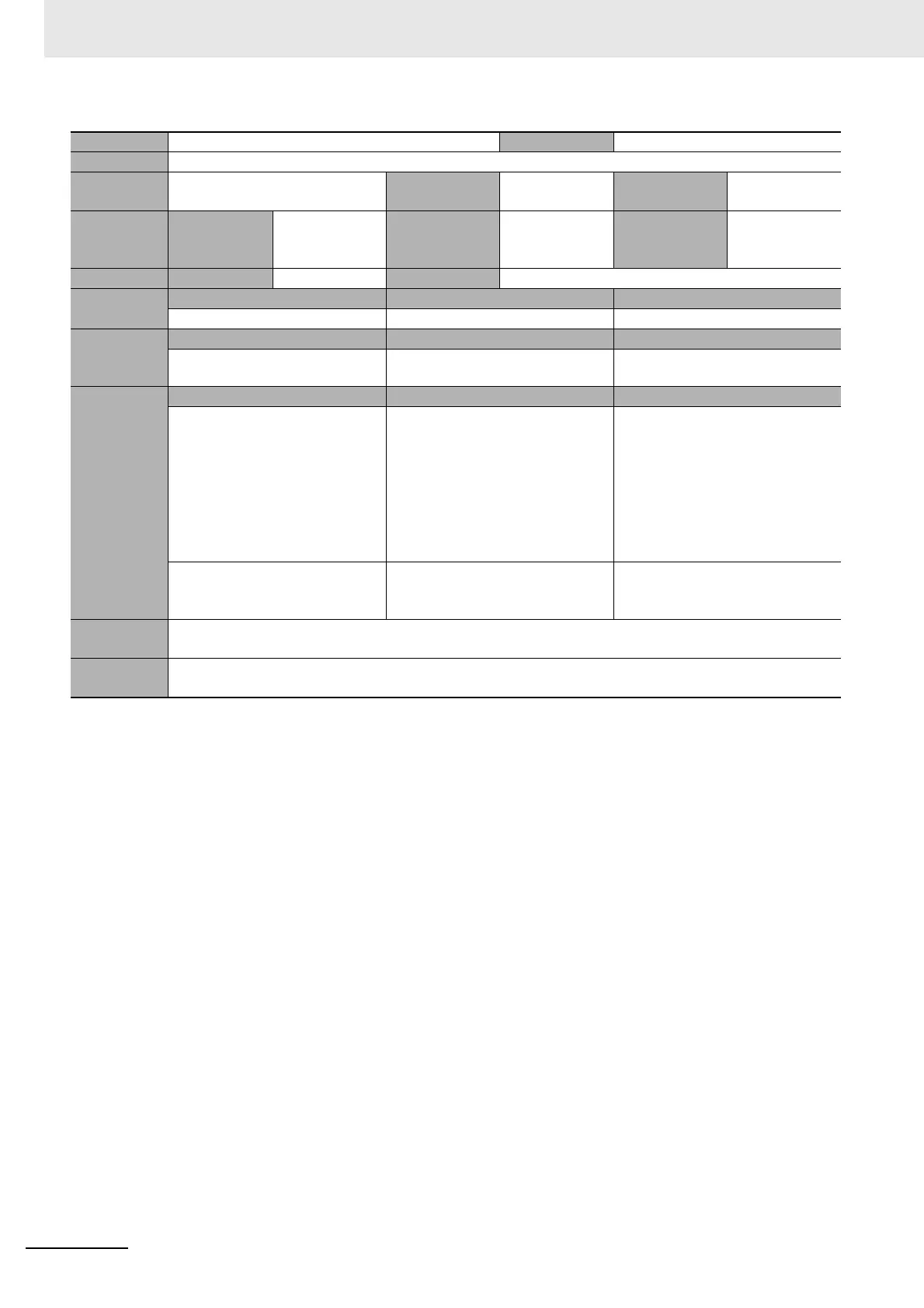
Event name Excessive Position Deviation Error Event code 38830000 hex
Meaning The position deviation is greater than or equal to the value set in the Following error window.
Source
EtherCAT Master Function Mod-
ule
Source details
Slave
Detection
timing
During Servo
ON
Error
attributes
Level
Minor fault
Recovery
Error reset
(after resetting
slave errors)
Log category
System log
Effects User program Continues. Operation Power drive circuit is OFF
Indicators
EtherCAT NET RUN EtherCAT NET ERR EtherCAT LINK/ACT
--- --- ---
System
-defined
variables
Variable Data type Name
None None None
Cause and
correction
Assumed cause Correction Prevention
The motor operation does not fol-
low the command
Identify and remove a cause that
limits the motor operation.
During the acceleration/decelera-
tion, the command may not be fol-
lowed depending on operation
patterns. In that case, adjust the
gain, increase the accelera-
tion/deceleration time or the like.
Adjust the gain and limit values
appropriately before use.
Set the operation pattern appropri-
ately according to the connected
load.
The value of Following error win-
dow is small
Increase the setting of the Follow-
ing error window to an acceptable
range.
Increase the setting of the Follow-
ing error window to an acceptable
range.
Attached
information
None
Precautions/
Remarks
AL status code: -, Error No.: 2400 hex

 Loading...
Loading...

