Remote Control Basics
R&S
®
SMB100A
253Operating Manual 1407.0806.32 ─ 21
After the first remote-control command has been sent, the instrument is in the
"REMOTE" state, i.e. instrument control from the front panel or via mouse and key-
board is disabled and "REMOTE" is displayed in the status line.
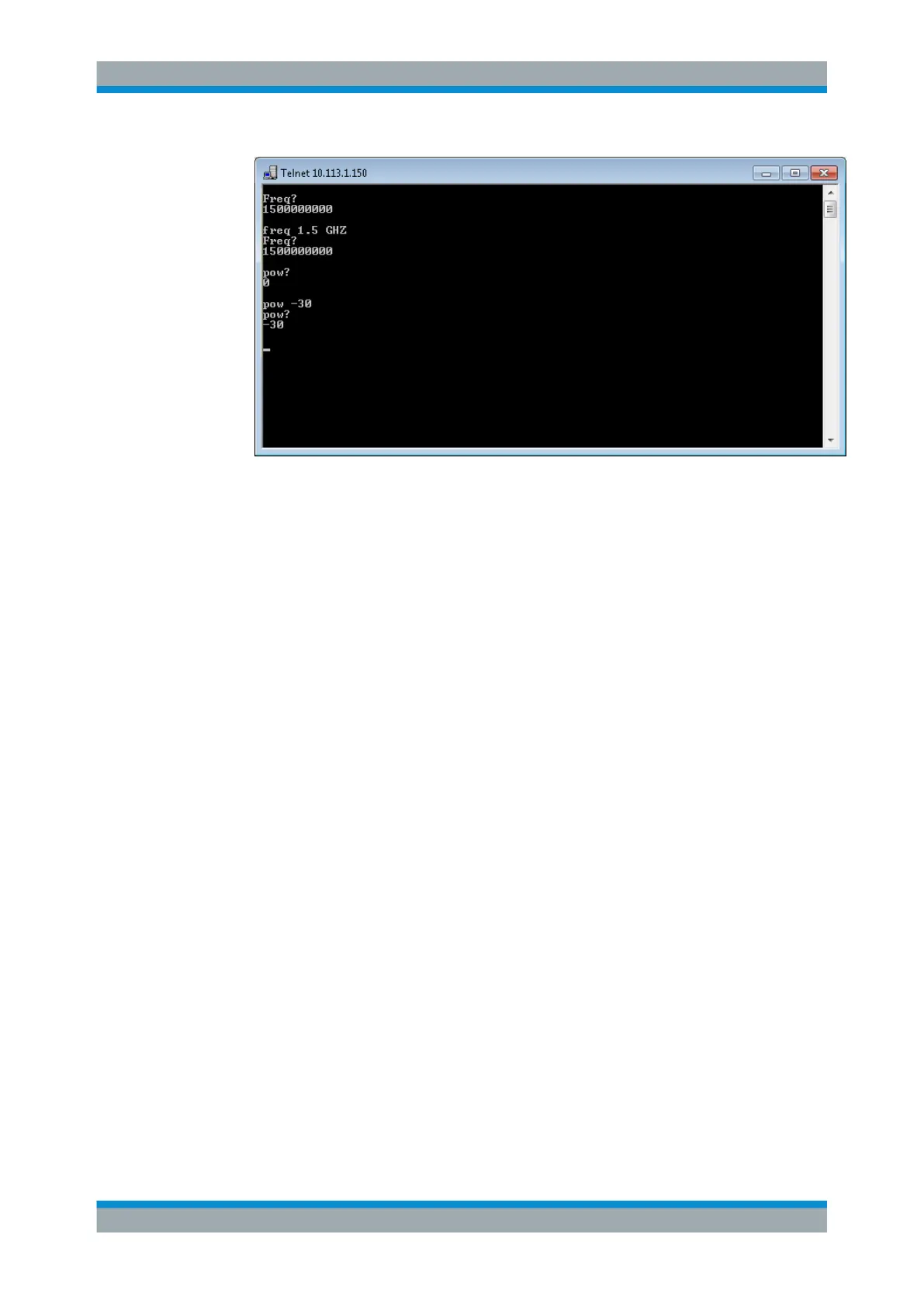
Telnet program examples
The following program example shows a simple TcpClient class that is intended to
explain on how to get started with programming of sockets.
The example sets up a socket communication to R&S SMB and opens a simple user
interface, very similar to the telnet, which allows input of commands. To enable real
automation, further development of the program is required.
TcpClient.h
#include <string>
//defines structs for socket handling
#include <netinet/in.h>
using namespace std;
typedef struct sockaddr_in SockAddrStruct;
typedef struct hostent HostInfoStruct;
class TcpClient
{
public:
TcpClient();
~TcpClient();
void connectToServer( string &hostname, int port );
void disconnect( );
void transmit( string &txString );
void receive( string &rxString );
string getCurrentHostName( ) const;
int getCurrentPort( ) const;
private:
string currentHostName;
int currentPort;
Starting a Remote Control Session

 Loading...
Loading...