15. Sample settings
15-4
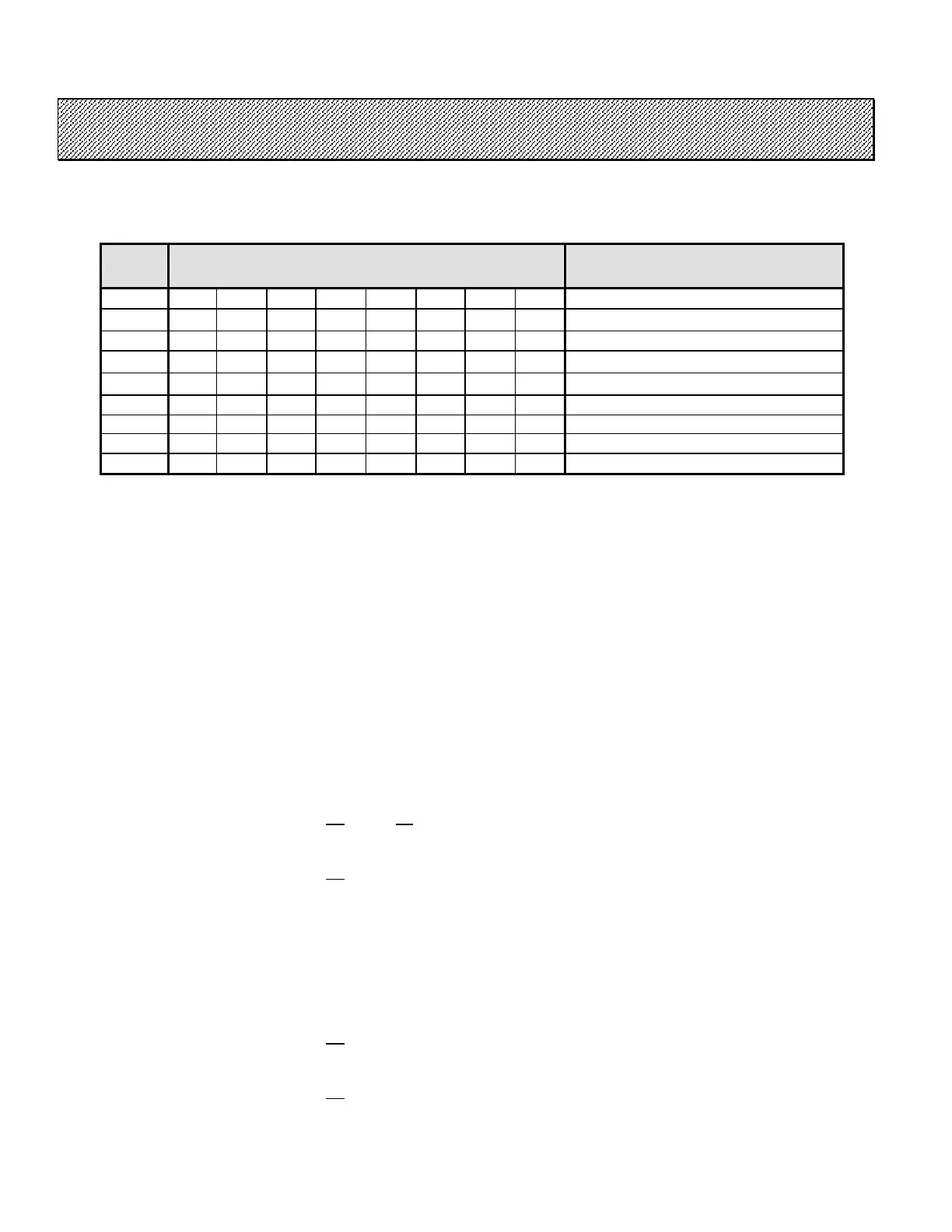
15.2 Program setting
●The sample program for simultaneous or sequential tightening.
STEP
PROGRAM CONTENTS
1 10 00 02 00 00 20 0A 00 SOFT START
2 20 00 40 00 00 20 00 00 HIGH SPEED
*1
3 40 00 00 00 00 00 00 00 BRAKE
4 60 01 00 00 00 00 00 00 INTERLOCK
*2
5 30 00 02 00 00 20 00 00 TIGHTEN (TORQUE CONTROL)
*3
6 00 00 00 00 00 00 00 00 NOP
7 80 08 02 00 00 20 00 00 SOCKET RELEASE
8 40 00 00 00 00 00 00 00 BRAKE
9 90 00 00 00 00 00 00 00 END OF CYCLE
*1 Lower the speed of HIGH SPEED (the 3
rd
and 4
th
byte), if the seating torque is not unified
(over shoot occurs).
*2 DRIVER will paused at this step, and output an INTERLOCK signal from the DRIVER I/O
interface. When the DRIVER receives an INTERLOCK input signal, the program steps to the
next step. Simultaneous and sequential tightening can be done by controlling this input/output
signal with PLC.
Change the second and fourth byte of the step 4 as follows to switch to the INTERLOCK for
the MULTI CONTROLLER at the INTERLOCK LEVEL 1.
Step4 60 01
00 00
↓ ↓
Step4 60 02
00 01
*3 Change the second byte of the step 5 as follows to change the fastening control method from
the ANGLE MONITORING TORQUE CONTROL METHOD to the TORQUE-TURN CONTROL
METHOD.
Step5 30 00
02 00 00 20 00 00
↓
Step5 30 01
02 00 00 20 00 00