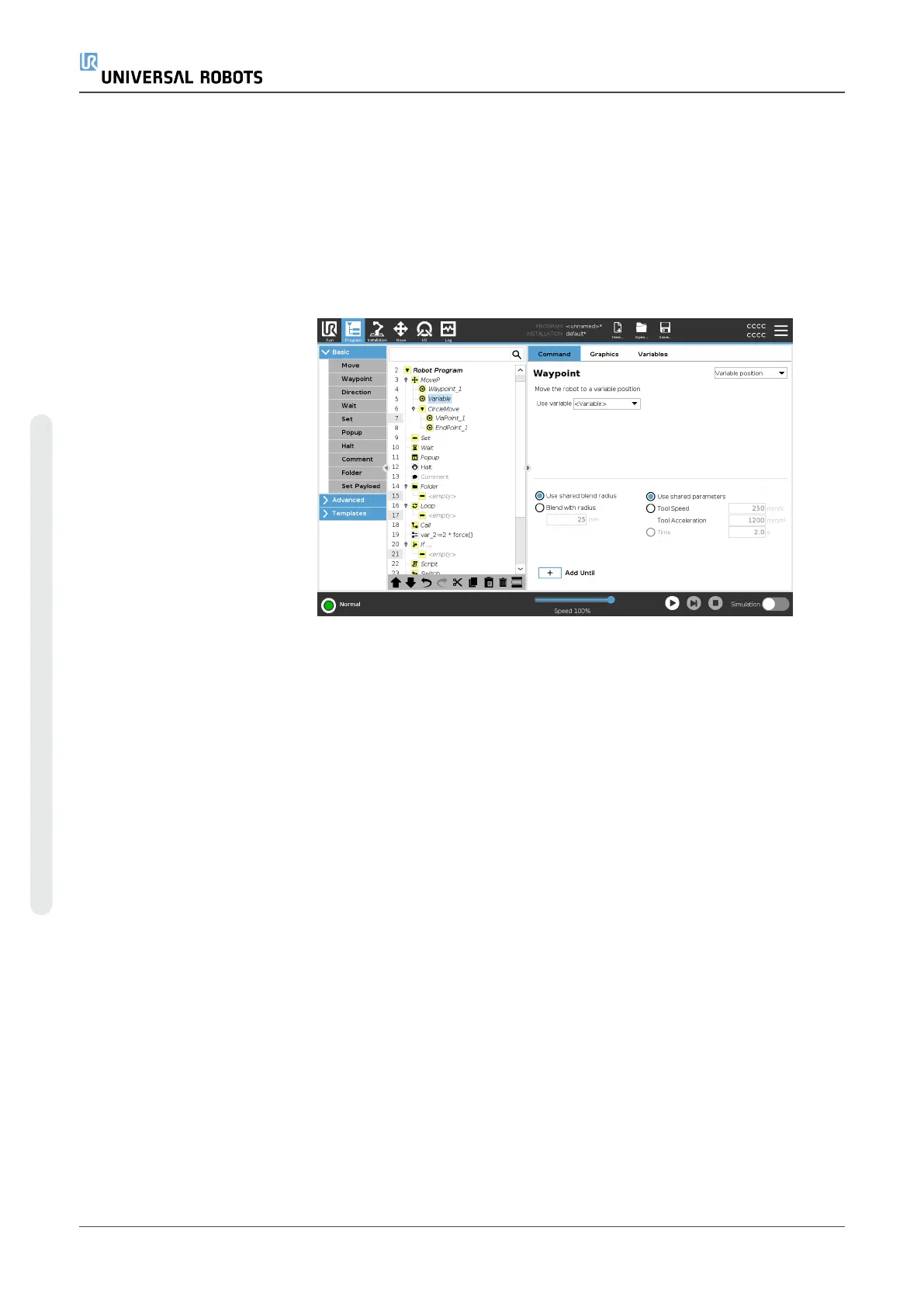
Add a variable
waypoint to a robot
program
1. In the Program tab, hit the basic menu
2. Add a move command
3. Select the automatically generated waypoint
a. Notice that the selector is automatically set to Fixed position.
b. Change the selector to Variable position.
4. Select the variable from the drop-down menu.
Detail A waypoint with the position given by a variable, in this case
calculated_
pose
.
The variable has to be a
pose
such as var=p[0.5,0.0,0.0,3.14,0.0,0.0].
The first three are
x,y,z
and the last three are the orientation given as a
rotation vector
given by the vector
rx,ry,rz
.
The length of the axis is the angle to be rotated in radians, and the vector
itself gives the axis about which to rotate.
The position is always given in relation to a reference frame or coordinate
system, defined by the selected feature.
If a blend radius is set on a fixed waypoint and the waypoints preceding
and succeeding it are variable or if the blend radius is set on a variable
waypoint, then the blend radius will not be checked for overlap (see
Blendingbelow).
If, when running the program, the blend radius overlaps a point, the robot
will ignore it and move to the next one.
Blending
UR16e 206 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.