7.6 Convenient Function to Use during Trial Operation
7.6.1 Program Jog Operation
7-15
n.1
(Waiting time
→ Reverse
by travel dis-
tance) ×
Number of
movements
n.2
(Waiting time
→ Forward
by travel dis-
tance) ×
Number of
movements
→ (Waiting
time →
Reverse by
travel dis-
tance) ×
Number of
movements
n.
3
(Waiting time
→ Reverse
by travel dis-
tance) ×
Number of
movements
→ (Waiting
time → For-
ward by
travel dis-
tance) ×
Number of
movements
n.
4
(Waiting time
→ Forward
by travel dis-
tance →
Waiting time
→ Reverse
by travel dis-
tance) ×
Number of
movements
n.
5
(Waiting time
→ Reverse
by travel dis-
tance →
Waiting time
→ Forward
by travel dis-
tance) ×
Number of
movements
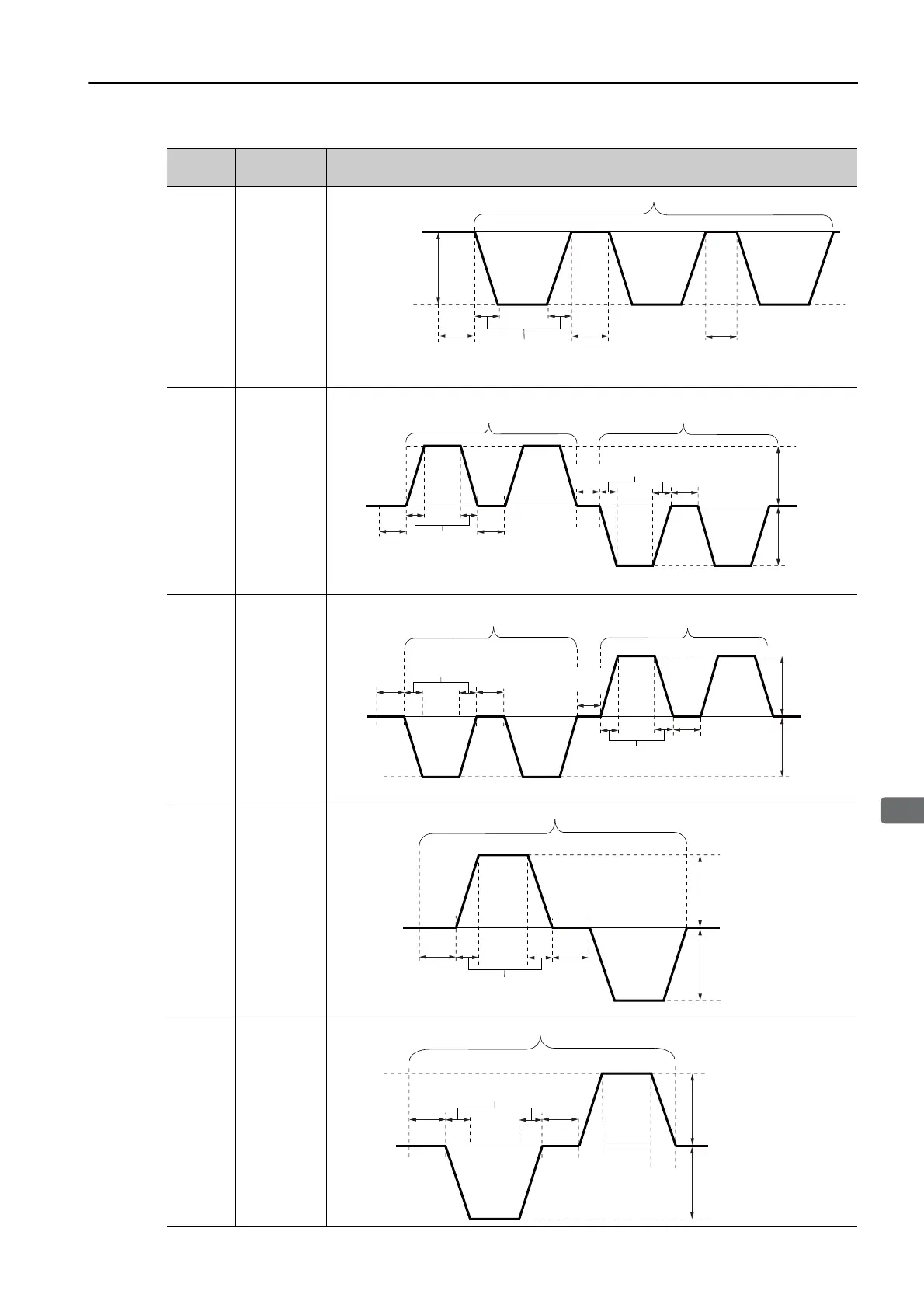
Continued from previous page.
Setting
of Pn530
Setting Operation Pattern
Speed 0
Movement Speed
Rotary Servomotor:
Pn533
Linear Servomotor:
Pn585
Waiting time
(Pn535)
Acceleration/
deceleration
time
Pn534
Waiting time
(Pn535)
Waiting time
(Pn535)
Travel
distance
(Pn531)
Travel
distance
(Pn531)
Travel
distance
(Pn531)
Number of movements (Pn536)
Number of movements (Pn536) Number of movements (Pn536)
Movement Speed
Rotary Servomotor:
Pn533
Linear Servomotor:
Pn585
Movement Speed
Rotary Servomotor:
Pn533
Linear Servomotor:
Pn585
Waiting time
(Pn535)
Acceleration
/deceleration
time (Pn534)
Waiting time
(Pn535)
Travel
distance
(Pn531)
Travel
distance
(Pn531)
Waiting time
(Pn535)
Acceleration/
deceleration
time (Pn534)
Waiting time
(Pn535)
Travel
distance
(Pn531)
Speed 0
Number of movements (Pn536)
Waiting time
(Pn535)
Acceleration/
deceleration
time (Pn534)
Waiting time
(Pn535)
Speed 0
Travel
distance
(Pn531)
Travel
distance
(Pn531)
Acceleration/
deceleration
time (Pn534)
Waiting time
(Pn535)
Waiting time
(Pn535)
Travel
distance
(Pn531)
Travel
distance
(Pn531)
Movement Speed
Rotary Servomotor:
Pn533
Linear Servomotor:
Pn585
Movement Speed
Rotary Servomotor:
Pn533
Linear Servomotor:
Pn585
Number of movements (Pn536)
Number of movements (Pn536)
Travel
distance
(Pn531)
Speed 0
Waiting time
(Pn535)
Acceleration/
deceleration
time (Pn534)
Waiting time
(Pn535)
Travel
distance
(Pn531)
Movement Speed
Rotary Servomotor: Pn533
Linear Servomotor: Pn585
Movement Speed
Rotary Servomotor: Pn533
Linear Servomotor: Pn585
Number of movements (Pn536)
Speed 0
Travel
distance
(Pn531)
Waiting time
(Pn535)
Acceleration/
deceleration
time (Pn534)
Waiting time
(Pn535)
Travel
distance
(Pn531)
Movement Speed
Rotary Servomotor: Pn533
Linear Servomotor: Pn585
Movement Speed
Rotary Servomotor: Pn533
Linear Servomotor: Pn585

 Loading...
Loading...






