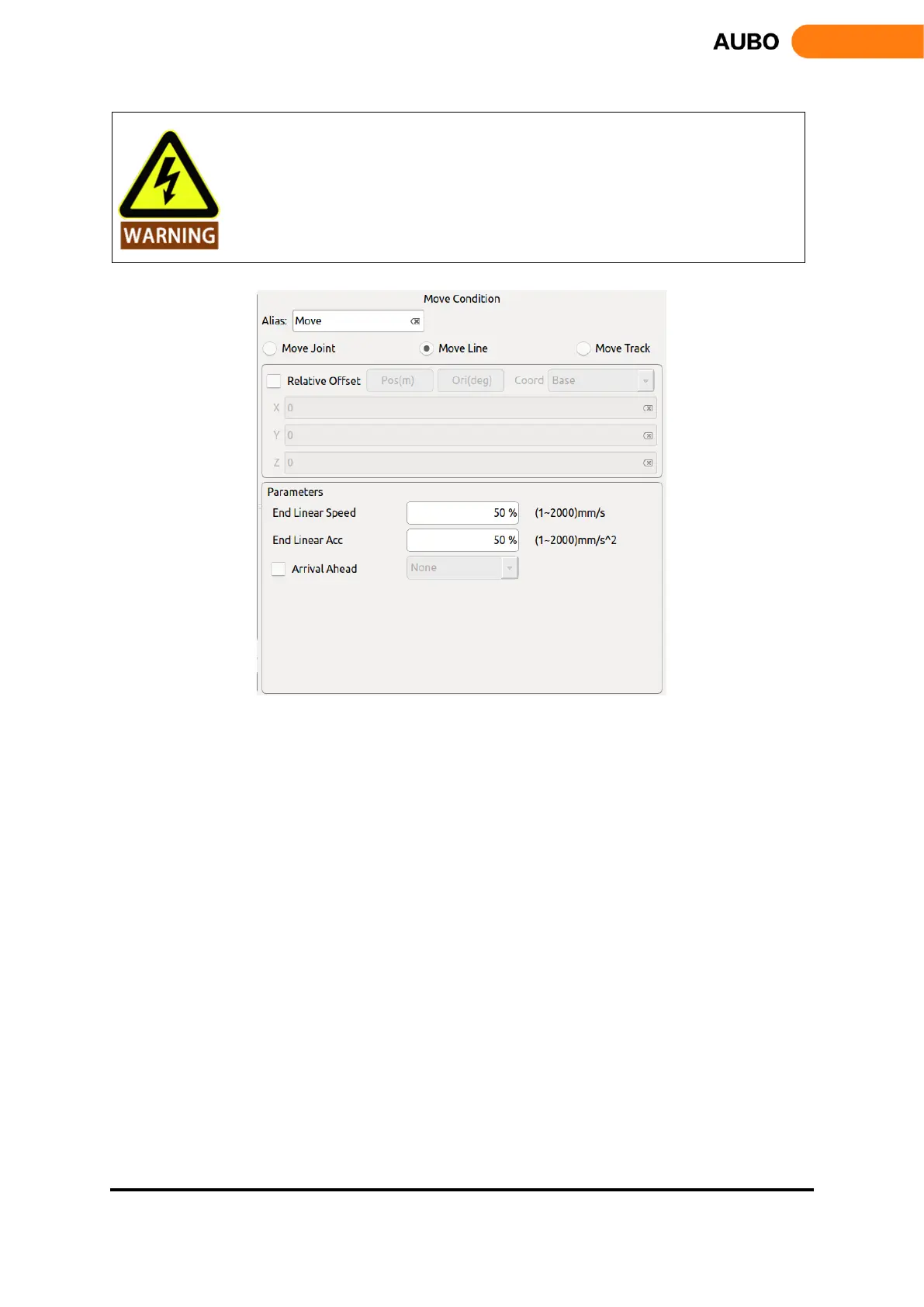
Figure 11.23 Move Line
c) Move Track
In multiple waypoints move track, the corresponding speed and acceleration of joint space and
Cartesian space is continuous and the speed of start and end waypoint is zero during the operation. It
provides six modes:【Arc】,【Cir】,【ArcWithOriRot】,【CirWithOriRot】,【moveP】Smooth
transition of linear trajectory,【B-Spline】B-spline curve.
Arc: Use three-point method to determine the arc and follow a sequence move from start waypoint to
end waypoint. It belongs to Cartesian space trajectory planning. Pose changes only influenced by the
start point and the end point. The meaning of maximum speed and acceleration is same as Move
Line. When the Arc is selected in the MoveTrack type, the robot moves in an arc motion.
Cir: Similar with arc, use three-point method to determine the track of full circle and the direction of
movement. Back to the start after completing the entire circumference of the movement. Keep the
pose of the start and the end points unchanged during the movement. The meaning of maximum speed
and acceleration is same as Move Line. When the Cir is selected in the MoveTrack type, the robot
moves in a circular motion.
ArcWithOriRot/CirWithOriRot: In industrial secenaios, especially welding applications, users
 Loading...
Loading...
