would like the robot to change its orientation along the way, so the welding equipment could keep
straight to the parts. The ArcWithOriRot and CirWithOriRot is to change the orientation during the
motion, the robot will calculate the angle between the end effector and the circle axis and keep the
angle along the whole movement.
MoveP: Fits a path curve according to the given path point. The more waypoints used to generate a
fitted curve, the closer the fitted curve is to the expected one. When programming the track motion
and linear motion of the manipulator, ensure that the adjacent waypoints in the two Move commands
are continuous, that is, the last waypoint of the previous Move command is the same as the first
waypoint of the next Move command. It is worth noting that when the manipulator makes a circular
motion, the last waypoint of the Move command is the first waypoint (the first and last waypoints
coincide). When there are Loop commands in the program logic list, the first waypoint of the first
Move command must be the same as the last waypoint of the last Move command.
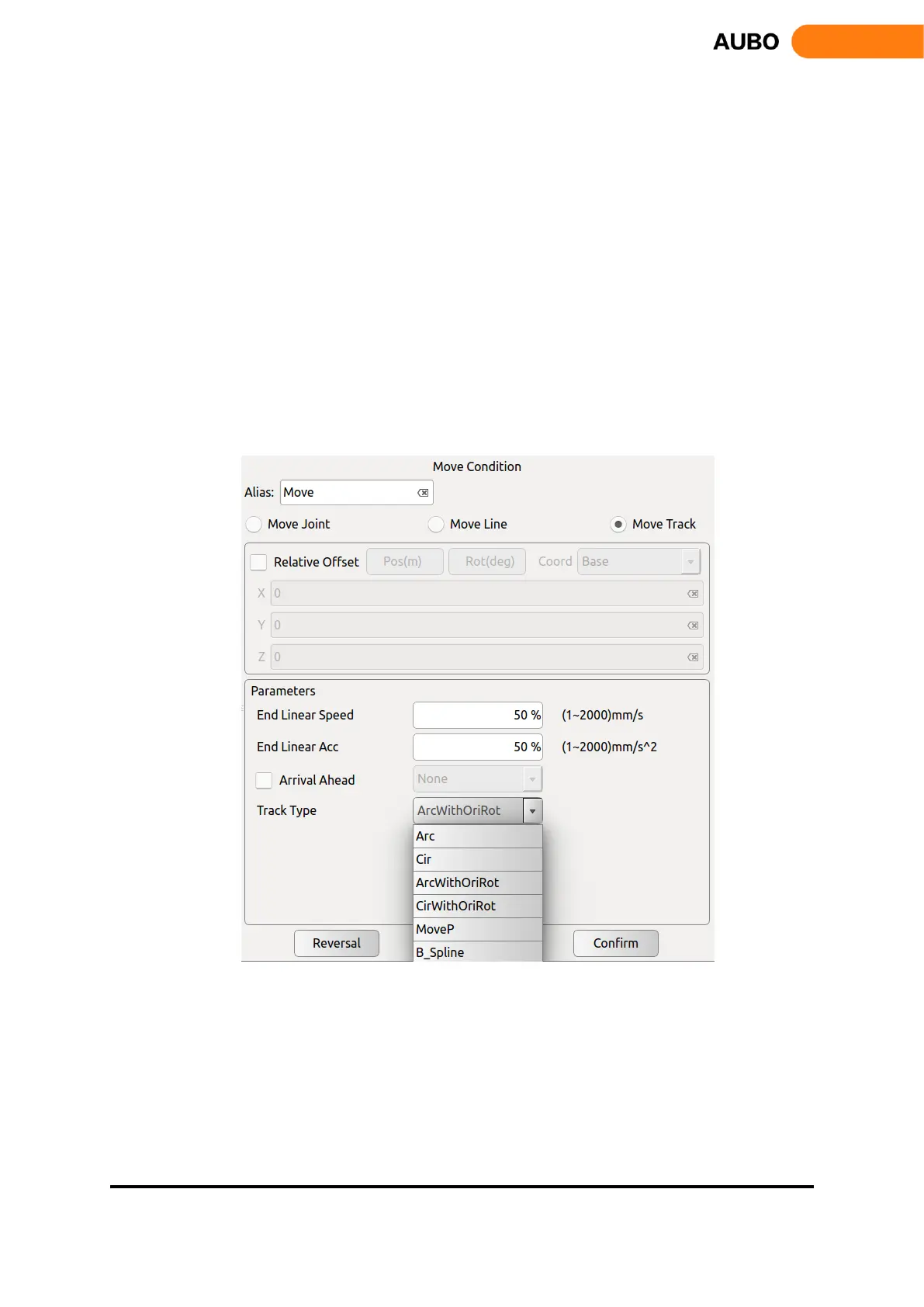
Figure 11.24 Move Track