12 - 11
12 Troubleshooting
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
12-3 Errors
12
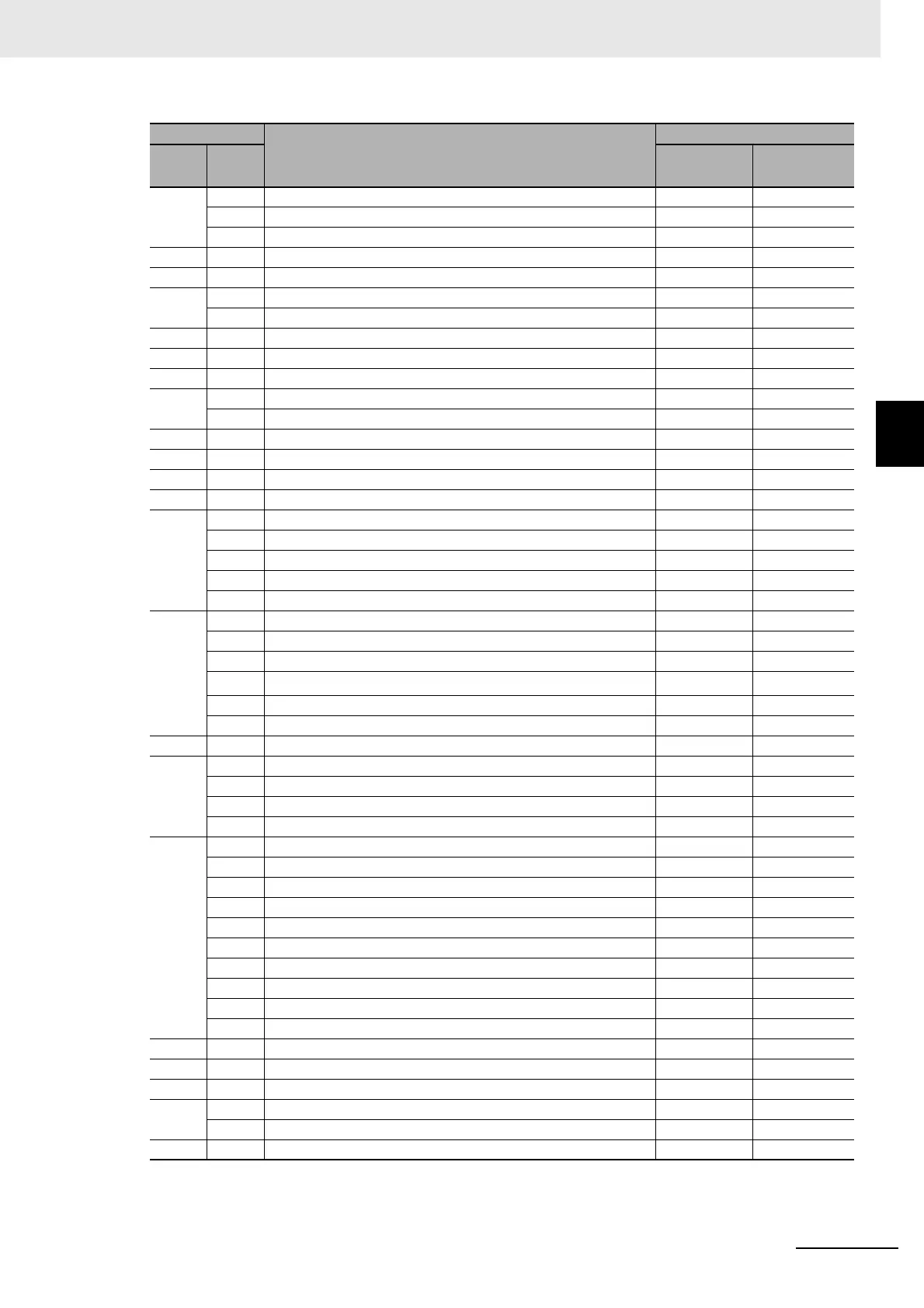
12-3-1 Error List
35 00 FPGA WDT Error --- B
01 System Error --- B
02 Self-diagnosis Error --- B
36 00 Non-volatile Memory Data Error --- A
37 00 Non-volatile Memory Hardware Error --- A
38 00 Drive Prohibition Input Error Yes A
01 Drive Prohibition Detected Yes A
41 00 Absolute Encoder Counter Overflow Error --- A
43 01 Encoder Memory Error --- B
44 00 1-rotation Counter Error --- B
45 00 Absolute Encoder Multi-rotation Counter Error --- B
01 Absolute Position Detection Error --- B
47 00 Overspeed Error --- B
58 00 Main Circuit Temperature Monitoring Circuit Failure --- B
59 00 Fan Error Yes A
62 00 Control Right Release Error Yes A
70 00 Safety Parameter Error Yes A
01 Safety Communications Setting Error Yes A
02 FSoE Slave Address Error Yes A
03 Safety Frame Error Yes A
04 Safety Communications Timeout Yes A
83 01 EtherCAT State Change Error Yes A
02 EtherCAT Illegal State Change Error Yes A
03 Communications Synchronization Error Yes A
04 Synchronization Error
Yes
*6
A
05 Sync Manager WDT Error Yes A
06 Bootstrap State Transition Request Error Yes A
87 00 Error Stop Input Yes A
88 01 ESC Initialization Error --- A
02 Synchronization Interruption Error --- A
03 SII Verification Error --- A
04 ESC Error --- A
90 00 Mailbox Setting Error Yes A
01 PDO WDT Setting Error Yes A
02 SM Event Mode Setting Error Yes A
03 DC Setting Error Yes A
04 Synchronization Cycle Setting Error Yes A
05 RxPDO Setting Error Yes A
06 TxPDO Setting Error Yes A
07 RxPDO Mapping Error Yes A
08 TxPDO Mapping Error Yes A
09 Node Address Updated --- A
91 01 Command Error Yes A
93 00 Electronic Gear Setting Error --- A
94 00 Function Setting Error Yes A
95 01 Motor Non-conformity --- A
05 Motor Replacement Detected --- A
97 00 Brake Interlock Error Yes A
*1. “Yes” means that you can clear the error by executing the error reset command. The mark “---” means that you
need to cycle the power supply or execute Unit Restart (2400 hex) to clear the error.
Error No.
Error name
Attribute
Main
(hex)
Sub
(hex)
Can be
reset
*1
Deceleration
operation
*2

 Loading...
Loading...

