12 - 45
12 Troubleshooting
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
12-5 Troubleshooting
12
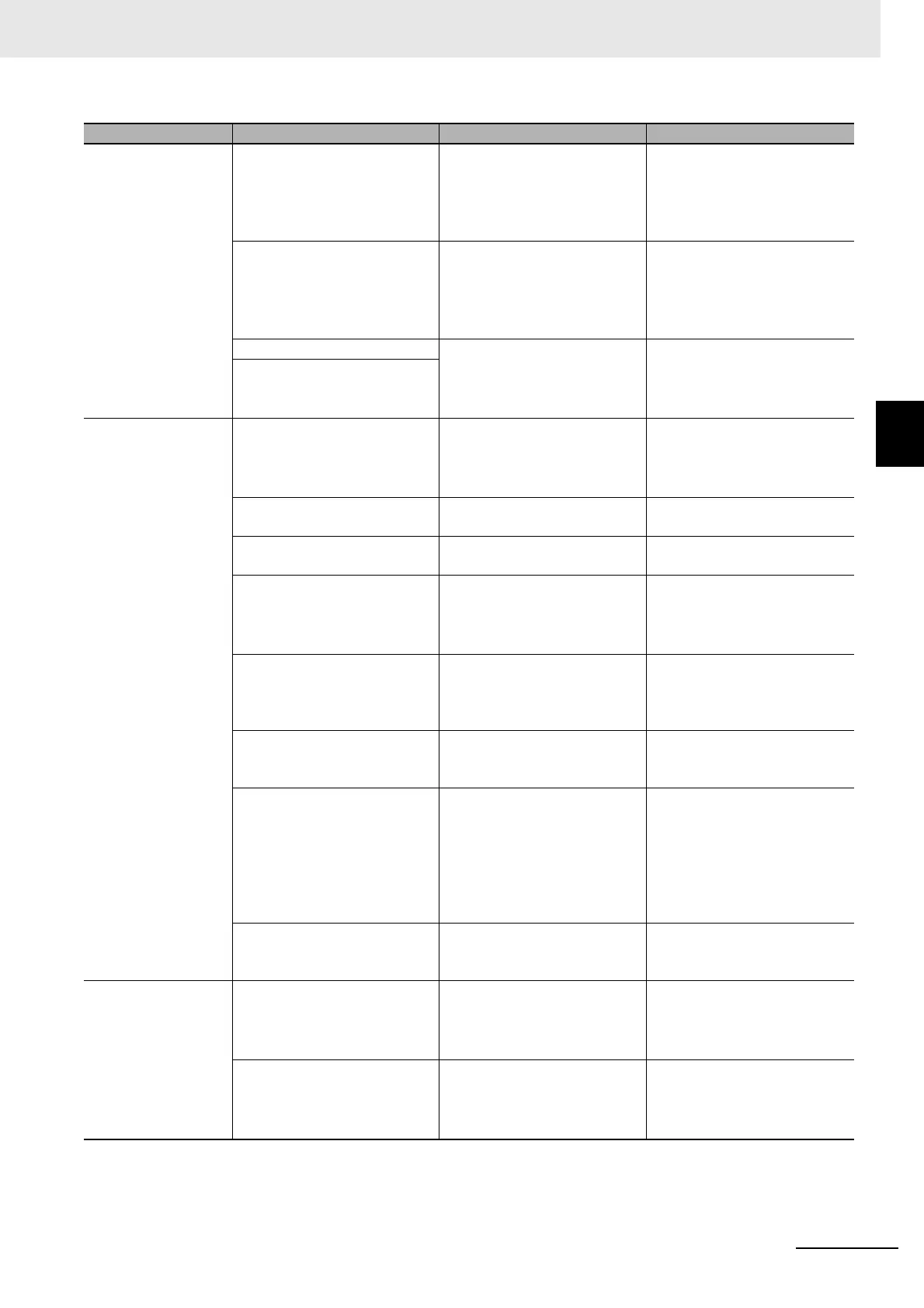
12-5-3 Troubleshooting Using the Operation State
The Servomotor is
overheating.
The ambient temperature is too
high.
Check to see if the ambient
temperature around the Servo-
motor is over 40°C.
• Lower the ambient tempera-
ture around the Servomotor
to 40°C or less. (Use a fan or
air conditioner.)
• Lower the load ratio.
The heat radiation condition for
the Servomotor is inappropri-
ate.
• Check to see if the specified
radiation conditions are
observed.
• For a Servomotor with a
brake, check the load ratio.
• Improve the radiation condi-
tions.
• Reduce the load.
• Improve ventilation.
The Servomotor is overloaded. Check the torque with the Sys-
mac Studio.
• Decrease the acceleration
and deceleration rates.
• Lower the speed and check
the load.
The Servomotor vibrates during
rotation.
The machine position
is misaligned.
The coupling of the motor shaft
and the machine is abnormal.
Check to see if the coupling of
the Servomotor and the
machine is misaligned.
• Tighten the coupling again.
• Replace the coupling with a
coupling that has no loose-
ness.
The host controller gave a
deceleration stop command.
Check the control ladder pro-
gram in the host controller.
Review the control in the host
controller.
The gain is wrong. --- Check if manual tuning can
achieve proper adjustment.
The load inertia is too large. • Check the load inertia.
• Check the Servomotor rota-
tion speed.
• Review the load inertia.
• Replace the Servomotor and
Servo Drive with proper
ones.
The power supply was turned
ON while the encoder
multi-rotation exceeded the
limit value.
Check Encoder - Multi-
rotation Data.
Perform the operation within
the multi-rotation range.
The command value from the
host controller is not correct.
Check the control ladder pro-
gram and settings in the host
controller.
Review the control and settings
in the host controller.
The home position was shifted. • Check the home position of
the absolute encoder.
• Check whether homing is
performed normally.
• Adjust the mechanical home
and home position of the
absolute encoder.
• Change the setting or input
signals so that the correct
home position can be defined
during homing.
The set values of the Servo
Drive do not match the
machine.
Check the settings of gear
ratio, gain, maximum torque,
etc.
Adjust the set values so that
they match the machine.
The Servomotor does
not stop or is hard to
stop even if the Servo
is turned OFF while
the Servomotor is
rotating.
The load inertia is too large. • Check the load inertia.
• Check the Servomotor rota-
tion speed.
• Review the load inertia.
• Replace the Servomotor and
Servo Drive with proper
ones.
The dynamic brake is disabled. Check if the dynamic brake is
disabled or broken.
• Enable the dynamic brake, if
it is disabled.
• Replace the dynamic brake if
it is broken.
Symptom Probable cause Check items Measures
 Loading...
Loading...


