Appendices
A - 50
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
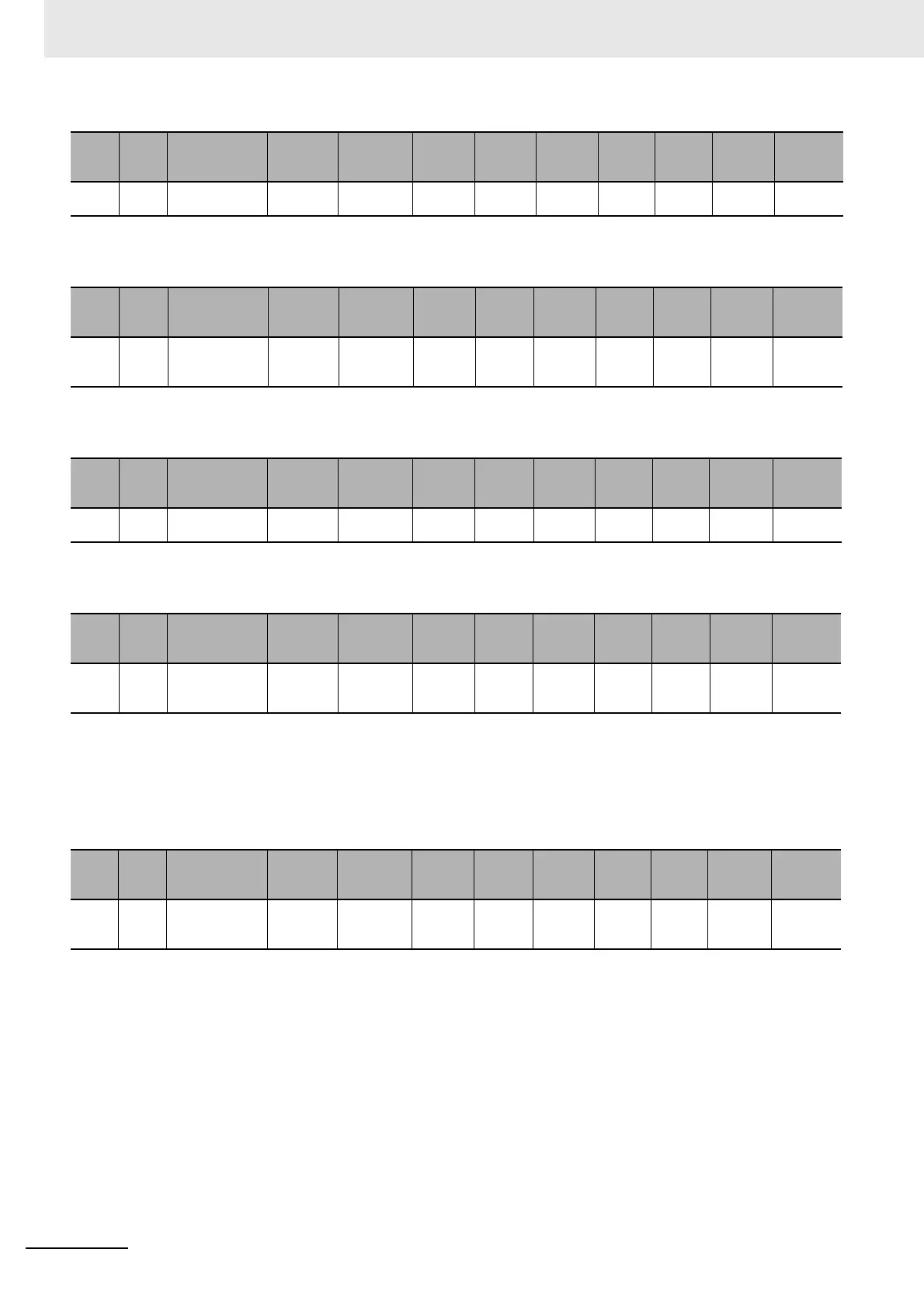
• This object gives the command velocity which is generated in the Servo Drive.
• The displayed value may have an error due to the unit conversion from [r/min] to [command unit/s].
• This object gives the present velocity.
• The displayed value may have an error due to the unit conversion from [r/min] to [command unit/s].
• This object sets the torque command in Cyclic synchronous torque mode (cst).
• Set the value in units of 0.1% of the rated torque (100%).
• This object sets the maximum torque limit value.
• Set the value in units of 0.1% of the rated torque (100%).
• This object is intended for PDO assignment. Use this object to set the maximum torque from a PDO.
• To use the limit value without mapping it to a PDO, set the value in Torque Limit – Max Torque
(3330-02 hex).
• This object gives the torque command value which is generated in the Servo Drive.
• The value is given in units of 0.1% of the rated torque (100%).
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
606B --- Velocity
demand value
--- Command
unit/s
--- --- 4 bytes
(INT32)
RO TxPDO Not pos-
sible
csp, pp,
hm
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
606C --- Velocity actual
value
--- Command
unit/s
--- --- 4 bytes
(INT32)
RO TxPDO Not pos-
sible
csp, csv,
cst, pp,
pv, hm
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
6071 --- Target torque -5,000 to
5,000
0.1% 0 A 2 bytes
(INT16)
W RxPDO Not pos-
sible
cst
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
6072 --- Max torque 0 to 5,000 0.1% 5,000 A 2 bytes
(U16)
RW RxPDO Not pos-
sible
csp, csv,
cst, pp,
pv, hm
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
6074 --- Torque demand --- 0.1% --- --- 2 bytes
(INT16)
RO TxPDO Not pos-
sible
csp, csv,
cst, pp,
pv, hm

 Loading...
Loading...

