Appendices
A - 106
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
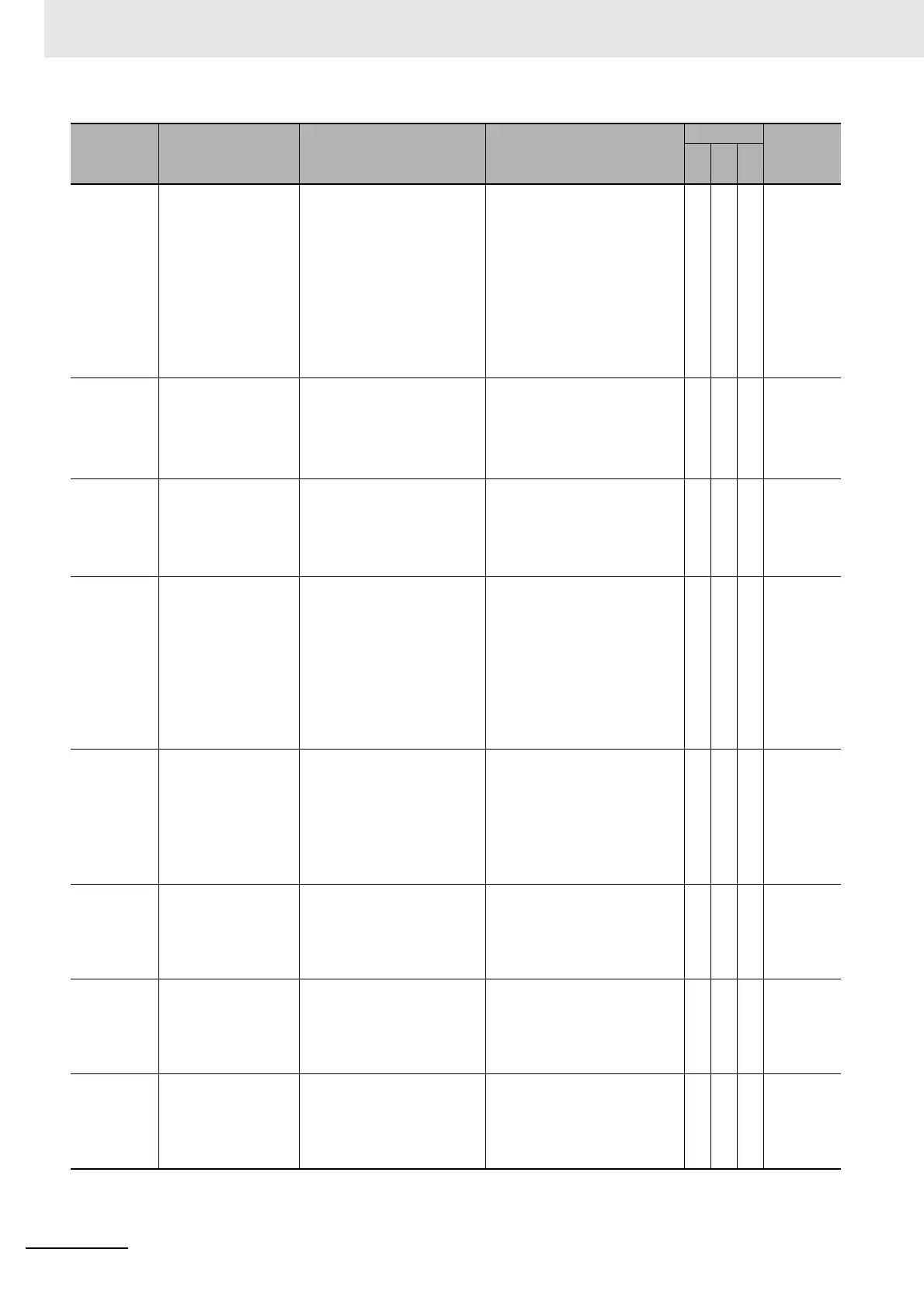
38840000 Excessive Speed
Deviation Error
The speed deviation is
greater than or equal to the
value set in the Excessive
Velocity Deviation Detec-
tion Level.
• The motor operation does
not follow the command
because a parameter value
is inappropriate
• The output axis of motor is
limited on the operation by
external forces
• The value of the Excessive
Velocity Deviation Detection
Level is inappropriate
√ P. A-147
38850000 Excessive Speed
Error
The feedback motor speed
is greater than or equal to
the value set in the Exces-
sive Speed Detection Level.
• The velocity command
value is too large
• Overshooting occurred
• The motor was rotated by
external forces
√ P. A-148
38860000 Following Error
Counter Overflow
The following error value
exceeded the range from
-2147483648 to
2147483647.
• The motor operation does
not follow the command
• The motor is rotated or lim-
ited on the operation by
external forces
√ P. A-149
38870000 Absolute Encoder
Counter Overflow
Error
The multi-rotation counter of
the encoder exceeded the
maximum number of rota-
tions.
• An inappropriate value was
set in the Encoder - Opera-
tion Selection when Using
Absolute Encoder
(4510-01 hex)
• The multi-rotation number
of the encoder exceeded
the maximum number of
rotations
√ P. A-149
38880000 Safety Communica-
tions Setting Error
Safety process data com-
munications were not estab-
lished with the Safety CPU
Unit because of an incorrect
communications setting.
• The watchdog time was set
incorrectly
• The processing was not
completed within the watch-
dog time because commu-
nications were not
established due to the noise
√ P. A-150
38890000 Safety Frame Error Safety process data com-
munications were not estab-
lished with the Safety CPU
Unit because an incorrect
frame was received.
• An incorrect frame was
received in safety process
data communications
• There is excessive noise
√ P. A-151
388A0000 Safety Parameter
Error
Safety process data com-
munications were not estab-
lished with the Safety CPU
Unit because an incorrect
parameter was received.
• The set safety slave model
is incorrect
√ P. A-151
388B0000 FSoE Slave Address
Error
Safety process data com-
munications were not estab-
lished with the Safety CPU
Unit because of an incorrect
FSoE slave address.
• The setting of the FSoE
slave address in the safety
process data communica-
tions settings is different
from the setting in the Unit
√ P. A-152
Event code
(hex)
Event name Description Assumed cause
Level
Refer-
ence
Min
Obs
Info

 Loading...
Loading...

