146 Rockwell Automation Publication KNX-SG001H-EN-P - December 2020
Kinetix 5100 EtherNet/IP Indexing Servo Drives
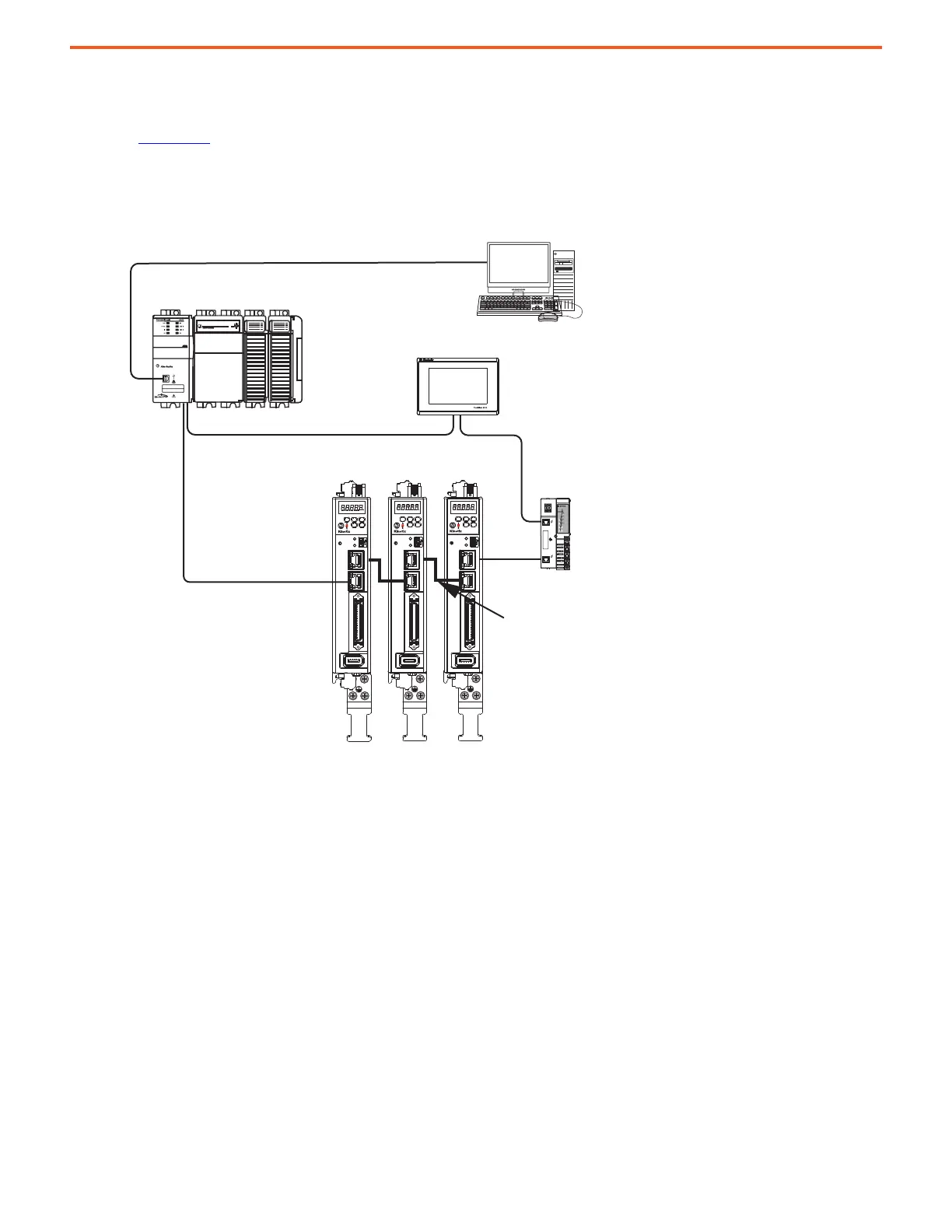
In this example, the devices are connected by using ring topology. If only one device in the ring is disconnected, the rest of the devices
continue to communicate. For ring topology to work correctly, a Device Level Ring (DLR) supervisor is required (for example, the Bulletin 1783
ETAP device). DLR is an ODVA standard. For more information, refer to the EtherNet/IP Embedded Switch Technology Application Guide,
publication ENET-AP005
.
Devices without dual-ports, for example the display terminal, require a 1783-ETAP module to complete the network ring.
Kinetix 5100 Ring Communication
1 (Front)
2 (Rear)
00:00:BC:2E:69:F6
2
1
I/0
AUX
5100
NET
MOD
CHARGE
2
1
I/0
AUX
5100
NET
MOD
CHARGE
2
1
I/0
AUX
5100
NET
MOD
CHARGE
02
0
1734-AENTR
Module
Status
Network
Activity
Network
Status
Point Bus
Status
System
Power
Field
Power
POINT I O
Link 1
Activity/
Status
Link 2
Activity/
Status
CompactLogix 5370 Controller
Studio 5000 Logix Designer
Application
CompactLogix Controller Programming Network
Kinetix 5100 Servo Drive System
(2198-E1004-ERS drives are shown)
1734-AENTR POINT I/O
EtherNet/IP Adapter
PanelView 5310
Display Terminal
1585J-M8CBJM-x
Ethernet (shielded) Cable
1585J-M8CBJM-OM3
0.3 m (1.0 ft) Ethernet cable
for drive-to-drive connections.

 Loading...
Loading...










