Rockwell Automation Publication KNX-SG001H-EN-P - December 2020 83
Kinetix 5500 Servo Drives
Typical Communication Configurations
The Kinetix 5500 drives support any Ethernet topology including linear, ring, and star by using ControlLogix, GuardLogix, or CompactLogix
controllers. These examples feature the CompactLogix 5370 programmable automation controllers (Bulletin 1769) with support for Integrated
Motion over the EtherNet/IP network. Refer to CompactLogix Controllers Specifications Technical Data, publication 1769-TD005
, for more
information on CompactLogix 5370 L1, L2, and L3 controllers.
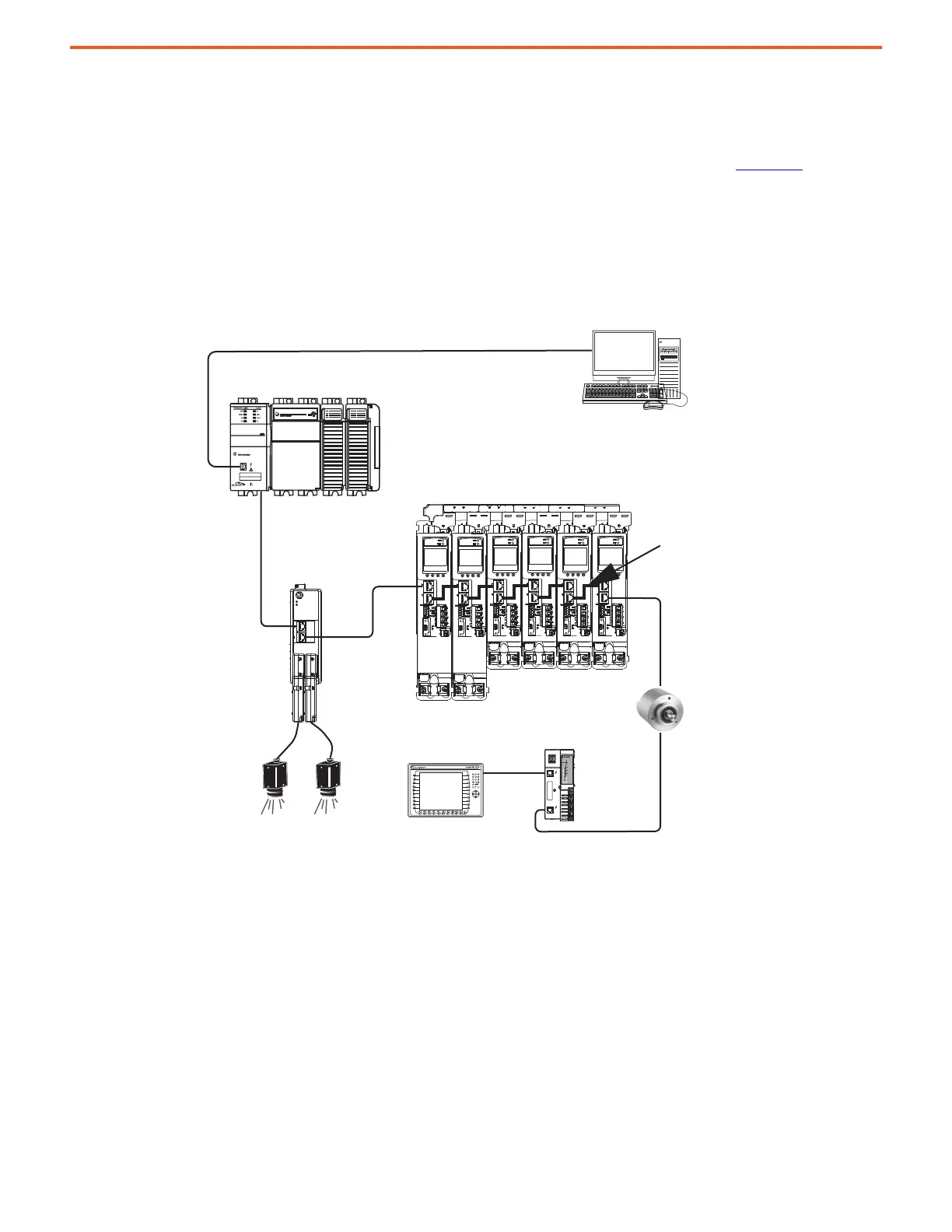
In this example, all devices are connected in linear topology. The Kinetix 5500 drives include dual-port connectivity, however, if any device
becomes disconnected, all devices downstream of that device lose communication. Devices without dual ports must include the 1783-ETAP
module or be connected at the end of the line.
Kinetix 5500 Linear Communication
1 (Front)
2 (Rear)
00:00:BC:2E:69:F6
02
0
1734-AENTR
Module
Status
Network
Activity
Network
Status
Point Bus
Status
System
Power
Field
Power
POINT I O
Link 1
Activity/
Status
Link 2
Activity/
Status
MOD
NET
OUTPUT-A OUTPUT-B
CompactLogix 5370 Controller
Studio 5000 Logix Designer
Application
1585J-M8CBJM-x
Ethernet (shielded) Cable
1734-AENTR POINT I/O™
EtherNet/IP Adapter
CompactLogix Controller Programming Network
PanelView Plus
Display Terminal
1585J-M8CBJM-OM3
0.15 m (6 in.) Ethernet cable
for drive-to-drive connections.
Kinetix 5700 Servo Drive System
842E-CM Integrated
Motion Encoder
2198-ABQE
Encoder Output Module

 Loading...
Loading...










