54 Rockwell Automation Publication KNX-SG001H-EN-P - December 2020
Kinetix 5700 Servo Drives
Safe Stop and Safe Monitor Configurations
Kinetix 5700 servo drives are capable of safe stop and safe monitor functions via drive-based and controller-based integrated safety over
the EtherNet/IP network.
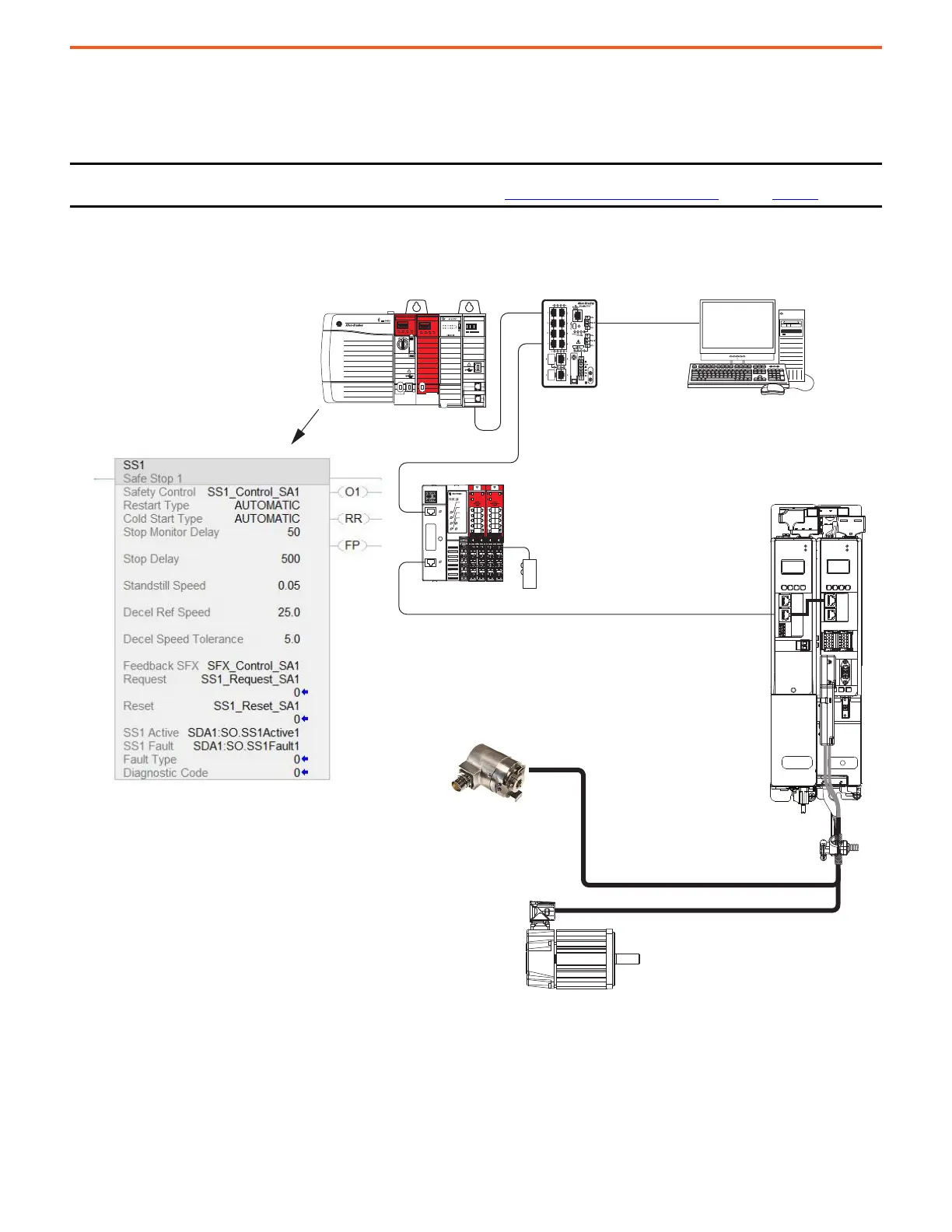
In this example, the SS1 stopping function is used in a motion and safety controller-based configuration with dual-feedback monitoring.
Safe Motion-monitoring Configuration
IMPORTANT For applications with safe stop and safe monitor safety functions, the GuardLogix 5580 or Compact GuardLogix 5380
controllers must be used. For more information, see the Integrated Functional Safety Support
table on page 55.
LNK1LNK2 NET OK
EtherNet/IP
1
2
MOD
NET
2
1
1
4
I/O
MOD
NET
2
1
UFB-A UFB-B
D+
D-
D+
D-
MF-A MF-B
1
I/O-A
6
510
1
I/O-B
6
510
Controller-based Instruction Example
Compact GuardLogix 5380
or GuardLogix 5580 Safety Controller
(GuardLogix 5580 Safety Controller is shown)
Kinetix 5700 Servo Drive System
with Integrated Safety Functions
Position feedback is sent
separately to the drive for
safety and for motion control.
Primary Feedback:
• Kinetix VPL, VPF, or VPH servo motors
with -W or -Q encoders
• Kinetix VPC servo motors
with -Q encoders
• Kinetix VPAR electric cylinders
with -W or -Q encoders
Secondary Feedback
Bulletin 842HR SIN/COS Encoder for
Dual Feedback Monitoring
Applications
DSL feedback connector kit with primary
feedback from the motor is hidden behind the
universal feedback connector kit with
secondary feedback from the external encoder.
1585J-M8CBJM-x
Ethernet (shielded) Cable
Studio 5000 Logix Designer
Application
1734-AENTR
POINT Guard I/O
EtherNet/IP Adapter
1783-BMS
Stratix 5700
Switch
Safety
Device
Secondary Feedback to UFB Connector
Primary Feedback to MF Connector

 Loading...
Loading...










