TR-Electronic GmbH 2008, All Rights Reserved Printed in the Federal Republic of Germany
Page 172 of 252 TR - EMO - BA - DGB - 0019 - 08 06/06/2019
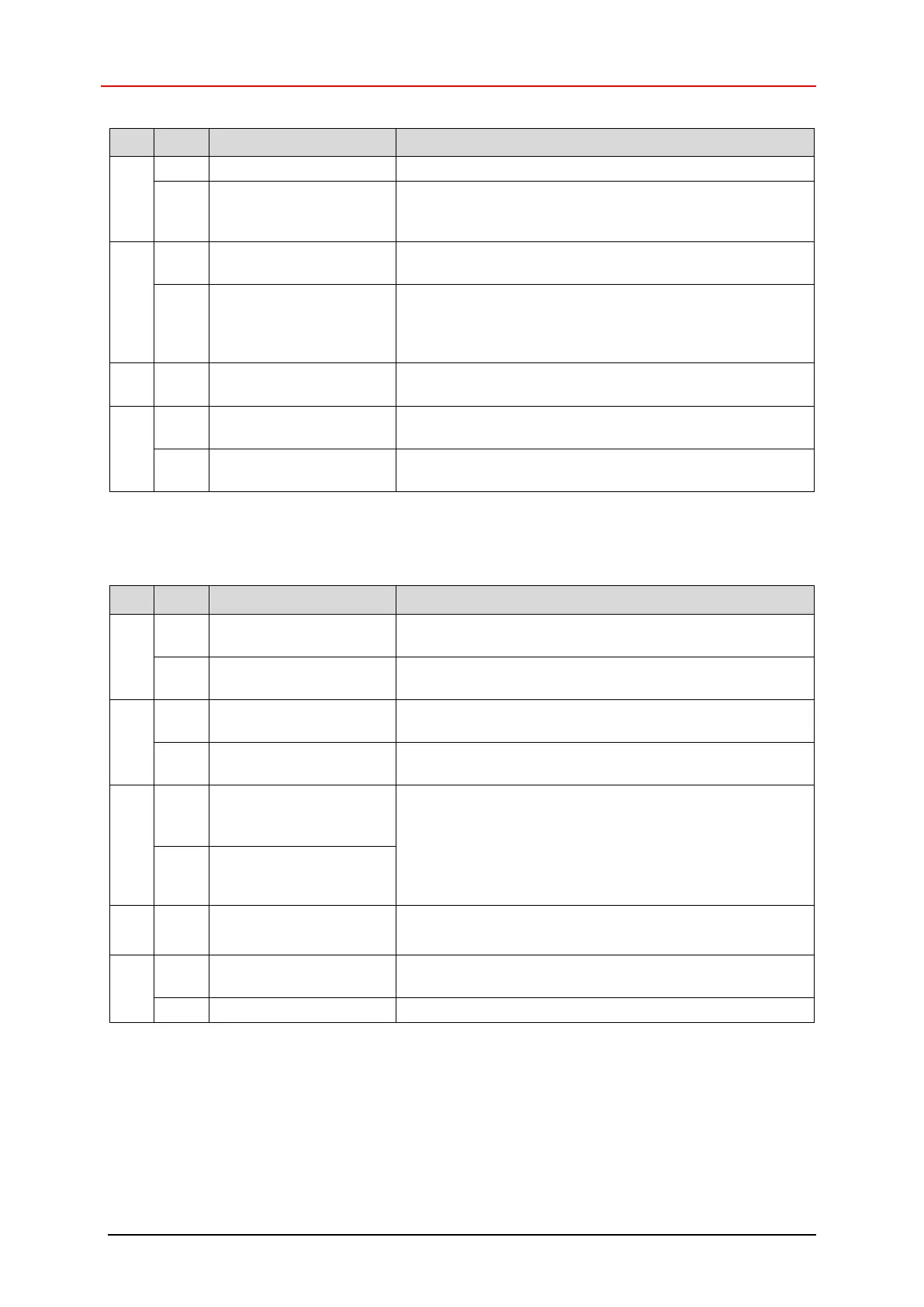
encoTRive brakes to rest from an active move order with
maximum acceleration. The current move order is
rejected.
Operating condition for
positioning
encoTRive brakes to zero speed from an active move
order on the ramp, and remains stopped with holding
torque. The move order is not rejected. The move order is
resumed when Bit 5 changes to 1.
Each edge enables a move order or a setpoint. A toggle
without changed the movement parameter is not allowed.
Referencing operation started. ZSW.11 is set to 0.
Prerequisite: Run enabled.
A current referencing operation is interrupted. Drive stops
on ramp.
Table 10: Control word P967 positioning
The dynamic comparison of setpoint and actual value lies
within the tracking window (P305)
The dynamic comparison of setpoint and actual value lies
outside the tracking window (P305)
The position value is within the positioning window at the
end of a move order (P304)
The position value lies outside the positioning window
(P304)
Referencing has been carried out and is valid.
ZSW.11 = 1: Response of the referencing procedure and
is only active until the system is rebooted (cold starting).
The parameter 805 represents the permanently adjusted
reference point, see chapter 8.5.1 Manufacturer-specific
parameters.
The acceptance of a new move order is acknowledged by
an edge (same level as STW.6)
Signalizes the completion of a move order, or standstill in
the case of pause and stop.
Move order is being executed, drive in motion
Table 11: Status word P968 positioning