No.
n.X
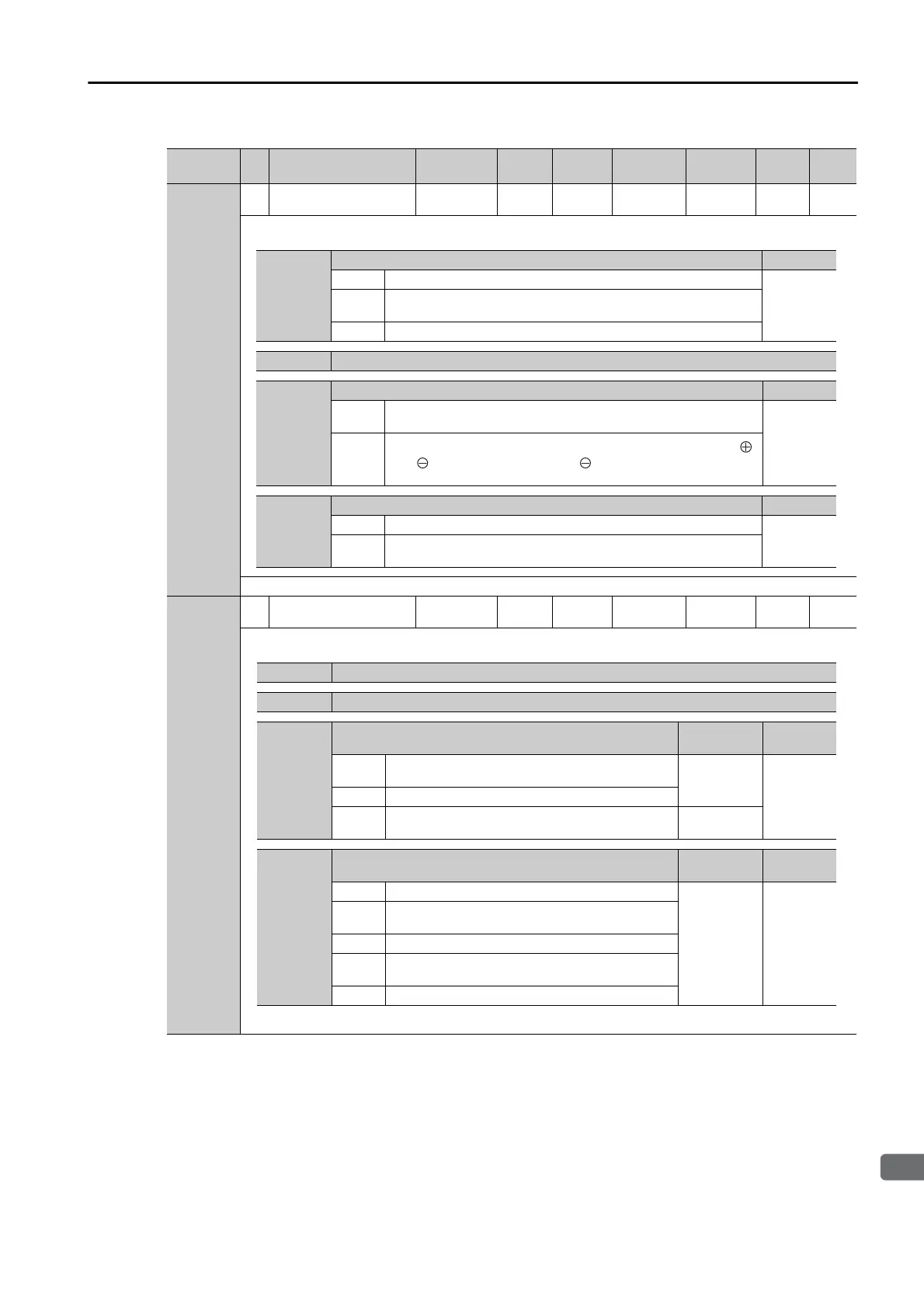
Motor Stopping Method for Servo OFF and Group 1 Alarms Reference
0 Stop the motor by applying the dynamic brake.
page 5-351
Stop the motor by the applying dynamic brake and then release
the dynamic brake.
2 Coast the motor to a stop without the dynamic brake.
n.X Reserved parameter (Do not change.)
n.X
Main Circuit Power Supply AC/DC Input Selection Reference
0
Input AC power as the main circuit power supply using the L1, L2,
and L3 terminals (do not use shared converter).
page 5-12
1
Input DC power as the main circuit power supply using the B1/
and 2 terminals or the B1 and 2 terminals (use an external
converter or the shared converter).
n.X
Warning Code Output Selection Reference
0 Output only alarm codes on the /ALO1 to /ALO3 terminals.
page 6-8
1
Output both warning codes and alarm codes on the /ALO1 to
/ALO3 terminals. If there is an alarm, the alarm code is output.
n.X Reserved parameter (Do not change.)
n.X Reserved parameter (Do not change.)
n.X
Encoder Usage
Applicable
Motors
Reference
0
Use the encoder according to encoder specifica-
tions.
All
page 6-231 Use the encoder as an incremental encoder.
2
Use the encoder as a single-turn absolute
encoder.
Rotary
n.X
External Encoder Usage
Applicable
Motors
Reference
0 Do not use an external encoder.
Rotary page 10-6
1
The external encoder moves in the forward direc-
tion for CCW motor rotation.
2 Reserved setting (Do not use.)
3
The external encoder moves in the reverse direc-
tion for CCW motor rotation.
4 Reserved setting (Do not use.)

 Loading...
Loading...






