3
Module Specifications
3.4.2
Counter Functions and Settings of LIO-01/LIO-02 Modules
3-40
[ e ] Axis Type Selection
There are two types of axis: An infinite length axis that resets the current value with a specified
value, and a finite length axis that does not reset the current value.
The finite length axis is used for rotation in one direction only, where the current value data is not
reset after rotation, and for return and other operations are performed only within a specified range.
The infinite length axis is used for applications such as resetting the current value data for a conveyor
belt or other device to 0 after one rotation.
If infinite length axis is set, the counter current value after conversion
and the PI latch data after con-
version is stored in the range 0 to infinite
length
axis reset position − 1.
Set the reset position in the counter fixed parameter No. 13 (Infinite Length Axis Reset Position
(POSMAX)).
( 5 ) Electronic Gear Function
The Electronic Gear Function can be used when other than 0 (pulse) is set to the counter fixed
parameter No. 08 (Reference Unit Selection).
[ a ] Outline
The Electronic Gear Function is used to set the workpiece travel distance per pulse input to the LIO
Module counter to any value.
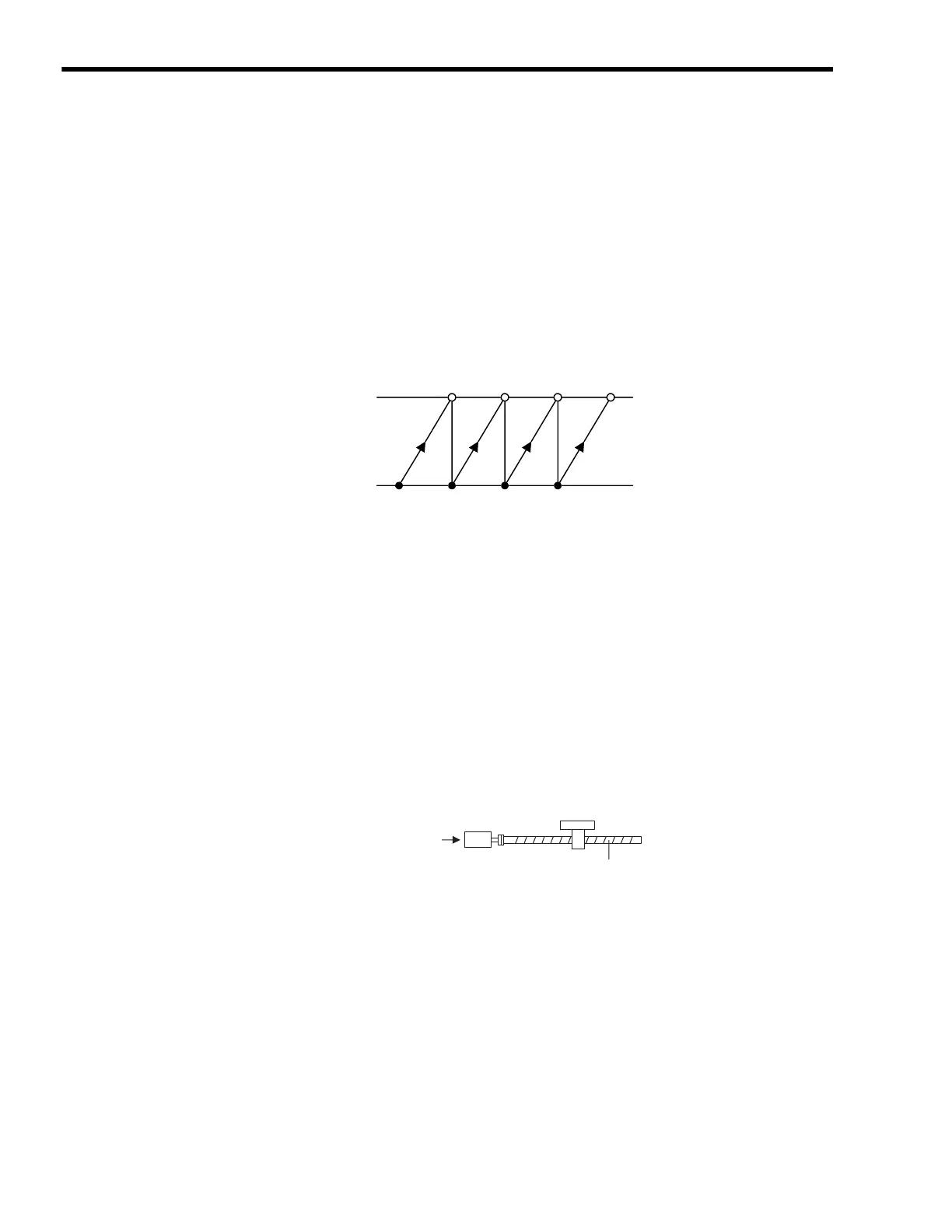
The following example describes differences in operations to move a workpiece 10mm using the
equipment shown below with and without electronic gear function. When using the electronic gear
function, simply input the reference value calculated for the travel distance regardless of the number
of pulses to move a workpiece for a specified travel distance.
POSMAX
0
When the Electronic Gear is Not Used
To move a workpiece 10mm:
1 revolution is 6 mm. Therefore,
10
÷
6
=
1.666 revolutions
2048
×4
pulses is 1 revolution. Therefore,
1.666
×
8092
=
13653 pulses
13653 pulses are input as reference pulses. The equation
must be calculated at the host controller.
When the Electronic Gear is Used
To move a workpiece 10mm:
Mechanical conditions and minimum reference unit are
defined with electronic gear.
To move a workpiece 10mm, the minimum reference unit is
set to 1
μ
m. Therefore,
10(mm)
÷
1(
μ
m)
=
10000
10000 is input as reference value.
Ball screw pitch: 6mm
Workpiece
No. of encoder pulses:
8192

 Loading...
Loading...




