7.2
Motion Command Details
7-89
7.2.24 Phase References (PHASE)
The PHASE command is used for the synchronized operation of multiple axes under phase control
mode, using the specified speed, phase bias, and speed compensation value.
Speed feed forward control cannot be used for the SGD-N or SGDB-N SERVOPACK, so the
PHASE command cannot be used.
( 1 ) Executing/Operating Procedure
1.
Check to see if all the following conditions are satisfied.
2.
Set the following motion setting parameters.
Speed Reference Setting: OL
10
Acceleration/Deceleration Filter Type: OW
03
Speed Loop P/PI Switch: OW
01
Phase Bias Setting: OL
28
Speed Amends: OW
31
The speed reference bit OL
10 can be changed during operation.
Offset in the sync between the axes can be compensated from the Phase Compensation bit
0L
28.
3.
Set OW
08 to 25 to execute the PHASE motion command.
Sync operation using phase control will start.
IW
08 will be 25 during the execution.
A command can be executed while the servo is ON.
Position management using the position feedback is possible during operation with torque
control mode.
4.
Execute another motion command to cancel the phase control mode.
R
No. Execution Conditions Confirmation Method
1 There are no alarms.
Both IL
02 and IL
04 are 0.
2 The Servo ON condition.
IB
001 is ON.
3 Motion command execution has been completed.
IW
08 is 0 and IB
090 is OFF.
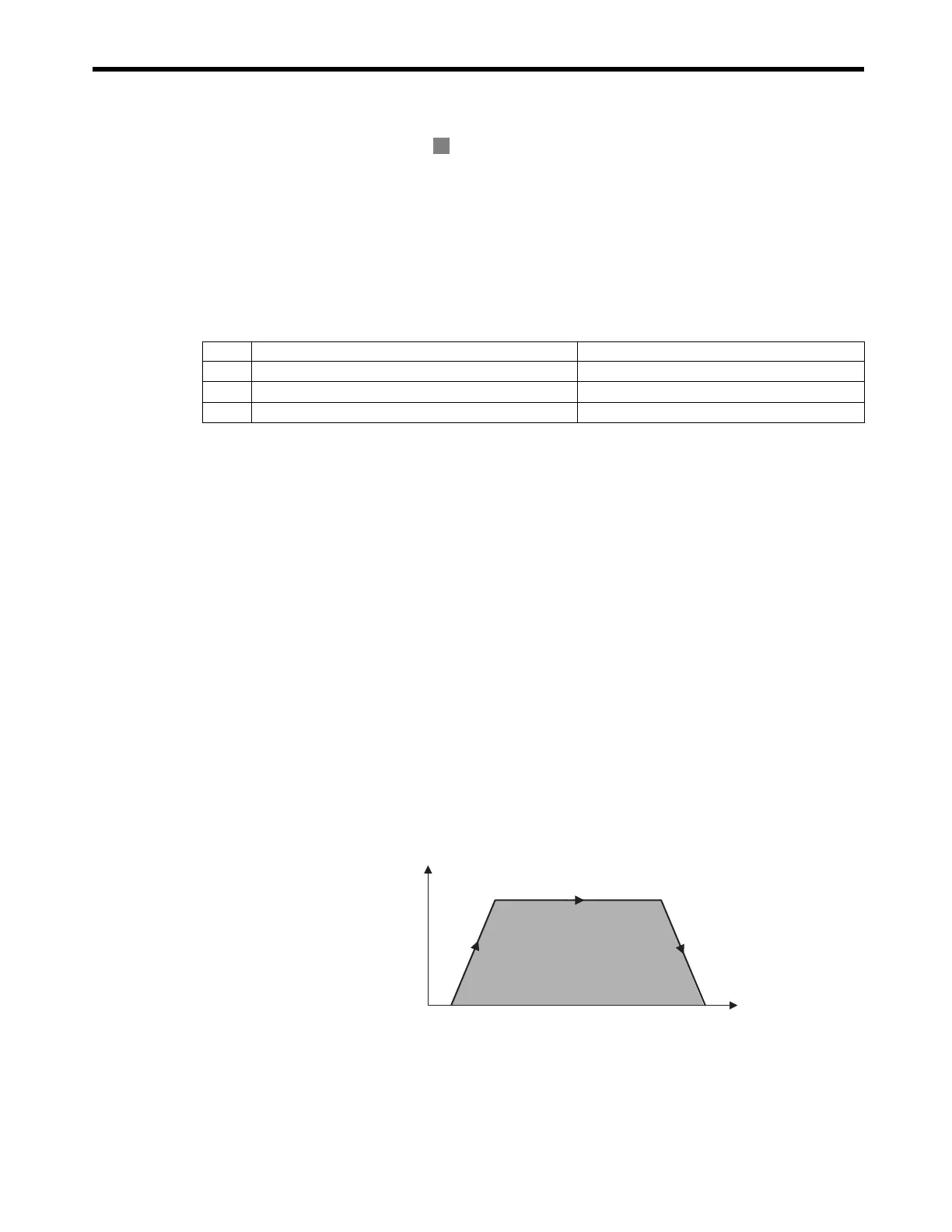
PHASE Operating Pattern
0
Speed (%)
Time (t)
Position

 Loading...
Loading...




