7.3
Motion Subcommands
7-95
7.3 Motion Subcommands
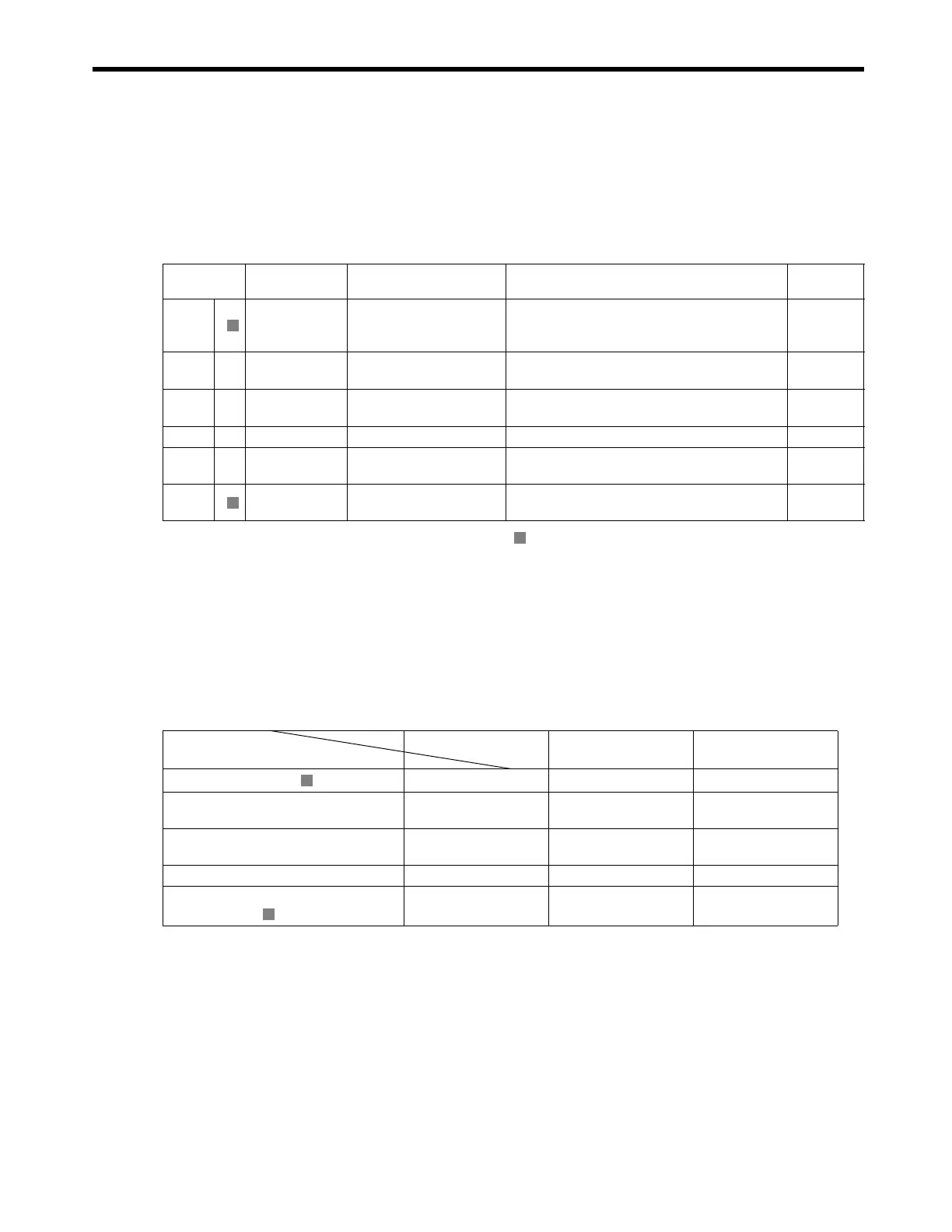
7.3.1 Motion Sub-command Table
This table shows the motion subcommands that are supported by the MP2300. Refer to the page in
the Table under Details for additional command information.
Commands in the table displaying an are supported by the Virtual Motion Module (SVR).
7.3.2 Motion Subcommand Settings
It may not be possible to execute some subcommands, depending on the motion command and
motion subcommand combination being used. Refer to Appendix A Switching Motion Commands
and Subcommands on page A-2 for details on which command combinations are allowed.
In addition, some motion subcommands can not be executed with the MECHATROLINK-I and
MECHATROLINK-II communication. (See the following table.)
Command
Code
Command Name Function
Reference
Page
0
NOP No Command
This is a null command.
When a subcommand is not being specified, set
this "no command" code.
7-96
1
− PRM_RD
Read SERVOPACK
Parameter
Reads the specified SERVOPACK parameter and
stores it in the monitoring parameters.
7-97
2
− PRM_WR
Write SERVOPACK
Parameter
Changes the specified SERVOPACK parameter's
set value.
7-98
3
− Reserved Reserved by system.
−
−
4
− SMON Monitor Status
Stores the servo driver's status in the monitoring
parameters.
7-100
5
FIXPRM_RD Read Fixed Parameters
Reads the specified fixed parameter’s current
value and stores it in the monitoring parameters.
7-102
R
R
R
Communication method
Subcommand
MECHATROLINK-
I
MECHATROLINK-
II
(17-byte)
MECHATROLINK-
II
(32-byte)
No Command (NOP)
Executable Executable Executable
Read SERVOPACK Parameter
(PRM_RD)
Not executable Not executable Executable
Write SERVOPACK Parameter
(PRM_WR)
Not executable Not executable Executable
Monitor Status (SMON)
Not executable Not executable Executable
Read Fixed Parameters
(FIXPRM_RD)
Executable Executable Executable
R
R

 Loading...
Loading...




