6
Motion Parameters
6.5.4
Position Reference
6-62
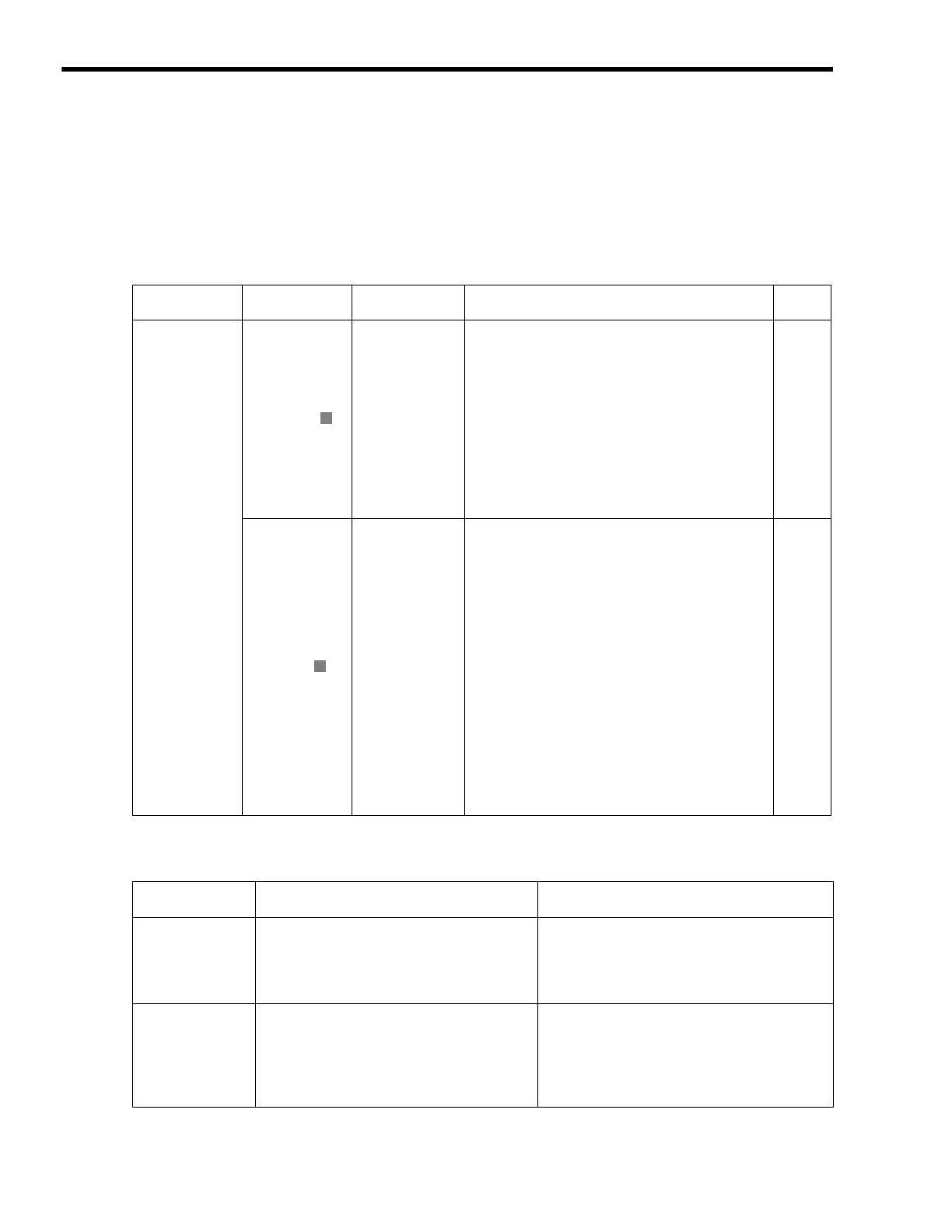
6.5.4 Position Reference
The target position value for position control is set for the Position Reference Setting (motion setting
parameter OL
1C). There are two methods that can be set for using the Position Reference Set-
ting: Directly setting the coordinate of the target position value as an absolute value or adding the
moving amount from the previous command position as a incremental value.
The following table lists the parameter details relating to position references.
The following table compares the advantage and disadvantage of incremental addition mode and
absolute mode.
Parameter Type
Parameter No.
(Register No.)
Name Description
Default
Value
Motion Setting
Parameters
OB
095
Position
Reference Type
Specify the type of position data.
0: Incremental Addition Mode
Adds the present moving amount value to the
previous value of OL
1C and sets the result in
OL
1C.
1: Absolute Mode
Sets the coordinate of the target position in
OL
1C.
Always set to 0 when using a motion program.
Always set to 0 when using an infinite length
axis.
0
OL
1C
Position
Reference Setting
Set the position data.
• Incremental Addition Mode (OB
095 = 0)
The moving amount (incremental distance) specified
this time will be added to the previous value of
OL
1C.
OL
1C
←
Previous OL
1C + Incremental
distance
Example:
If a travel distance of 500 is specified and the
previous value of OL
1C is 1000, the following
will occur:
OL
1C
←
1000 + 500 = 1500
• Absolute Mode (OB
095 = 1)
The coordinate value of the target position is set.
Example:
Set 10000 to move to a coordinate value of 10000.
OL
1C
←
10000
0
R
R
Position Reference
Type
Advantage Disadvantage
Incremental
Addition Mode
It is not necessary to consider the relationship
between OL
1C and the current position when
canceling a move.
Incremental addition mode can be used for finite or
infinite length axis type.
OL
1C does not necessarily equal the coordinate
value of the target position, so the position reference
can be difficult to understand intuitively.
Absolute Mode
The coordinate of the target position is specified
directly, making it easy to understand intuitively.
The current position must be set in OL
1C
whenever the power supply is turned ON or a move
is canceled. If this is not done, the axis may move
suddenly when a move command is started.
Absolute mode cannot be used for an infinite length
axis type.

 Loading...
Loading...




