6
Motion Parameters
6.3.2
Setting Parameter List
6-12
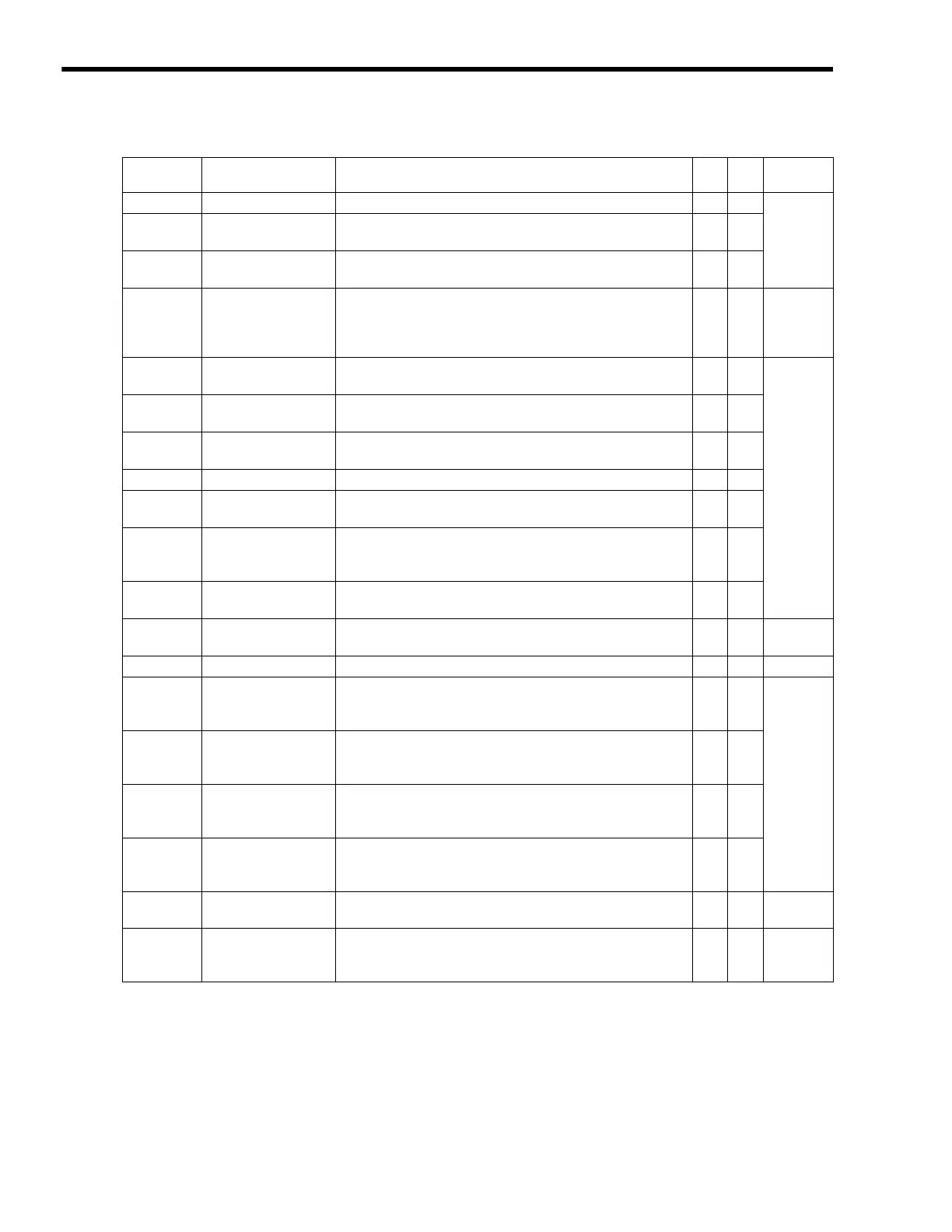
OL48
Zero Point Offset
1 = 1 reference unit
Yes Yes
6-43
OL4A
Work Coordinate
System Offset
1 = 1 reference unit
Yes Yes
OL4C
Preset Data of
POSMAX Turns
1 = 1 reference unit
Yes Yes
OW4E
Servo User Monitor
Bits 0 to 3: Monitor 1 (Cannot be set.)
Bits 4 to 7: Monitor 2
Bits 8 to B: Monitor 3 (Cannot be set.)
Bits C to F: Monitor 4
Yes 6-44
OW4F
Servo Alarm Monitor
Number
Set the number of the alarm to monitor.
Yes
6-45
OW50
Servo Constant
Number
Set the number of the SERVOPACK parameter.
Yes
OW51
Servo Constant
Number Size
Set the number of words in the SERVOPACK parameter.
Yes
OL52
Servo User Constant
Set the setting for the SERVOPACK parameter.
Yes
OW54
Auxiliary Servo User
Constant Number
Set the number of the SERVOPACK parameter number.
Yes
OW55
Auxiliary Servo
Constant Number
Size
Set the number of words in the SERVOPACK parameter.
Yes
OL56
Auxiliary Servo User
Constant
Set the setting for the SERVOPACK parameter.
Yes
OW5C
Fixed Parameter
Number
Set the number of the fixed parameter to read with the
FIXPRM_RD motion subcommand.
Yes Yes 6-45
OW5D
−
Reserved for system use.
−− −
OL5E
Absolute Position at
Power OFF (Lower 2
words)
1 = 1 pulse
Yes
6-46
OL60
Absolute Position at
Power OFF (Upper 2
words)
1 = 1 pulse
Yes
OL62
Modularized Position
at Power OFF (Lower
2 words)
1 = 1 pulse
Yes
OL64
Modularized Position
at Power OFF (Upper
2 words)
1 = 1 pulse
Yes
OL66 to
OL6E
−
Reserved for system use.
−− −
OW70
to
OW7F
Command Buffer for
Transparent
Command Mode
This area is used for command data when MECHATROLINK
servo commands are specified directly.
Yes 6-46
(cont’d)
Register No. Name Contents SVB SVR
Reference
Page

 Loading...
Loading...




