7.1
Motion Commands
7-3
7.1 Motion Commands
7.1.1 Motion Command Table
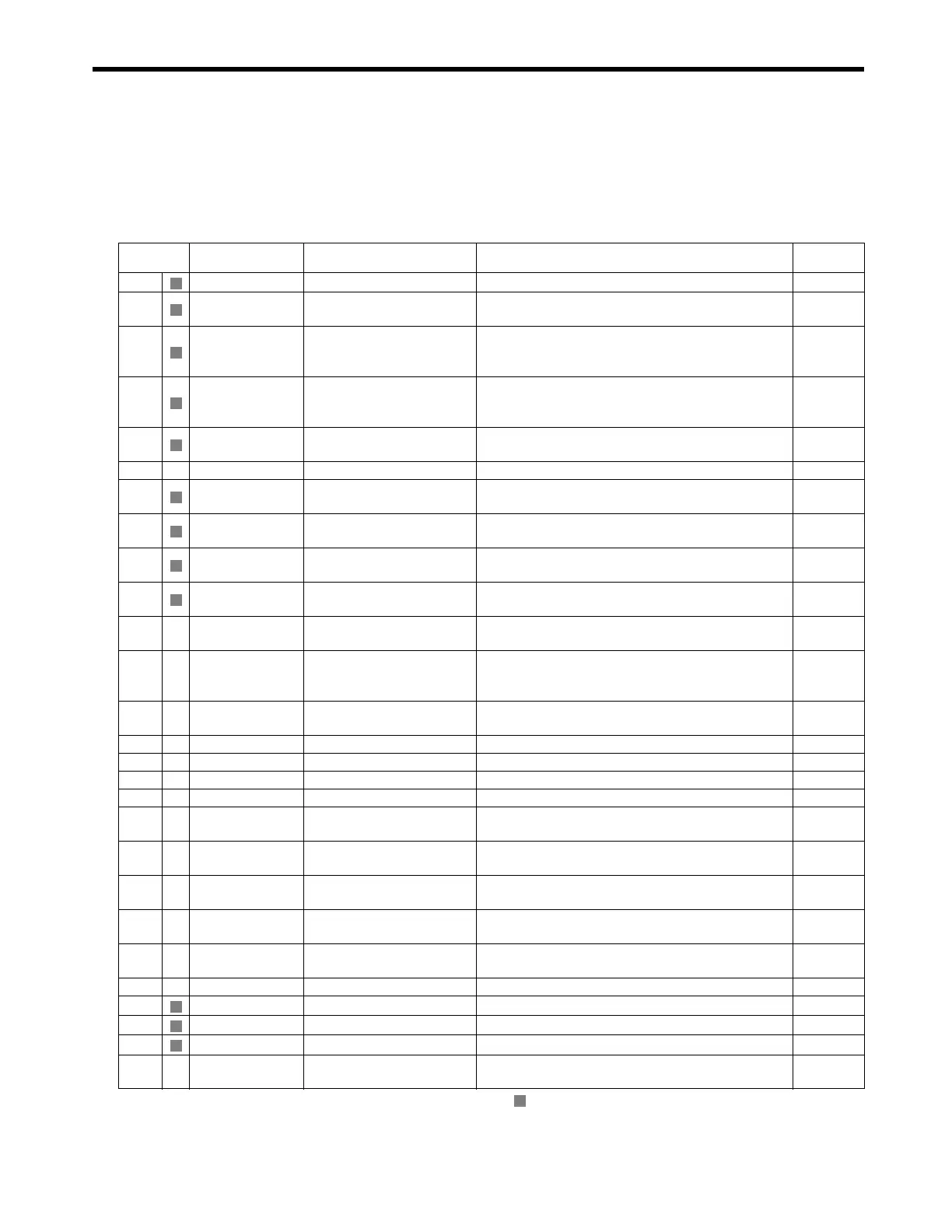
This table shows the motion commands that are supported by the MP2300. Refer to the page in the
Table under Details for additional command information.
Commands in the table displaying an are supported by the Virtual Motion Module (SVR).
Refer to 3.2.4 SVR Virtual Motion Module on page 3-11 for details on the Virtual Motion Module
(SVR).
Command
Code
Command Name Description
Reference
Page
0 NOP No command
--
1 POSING Positioning
Positions to the specified position using the specified
acceleration/deceleration times and the specified speed.
7-5
2 EX_POSING External Positioning
Positions by moving the external positioning travel
distance from the point an external positioning signal was
input when already performing a positioning operation.
7-11
3 ZRET Zero Point Return
Returns to the zero point in the machine coordinate
system. When using an incremental encoder, there are 17
different zero point return methods that can be used.
7-16
4 INTERPOLATE Interpolation
Performs interpolation feeding using positioning data
distributed consecutively from the CPU Module.
7-36
5 Reserved
6LATCH Latch
Memorizes the current position when the latch signal is
input during an interpolation feed operation.
7-40
7 FEED JOG Operation
Moves the axis at the specified speed in the specified
direction until the command is canceled.
7-44
8 STEP STEP Operation
Positions the specified travel distance in the specified
direction at the specified speed.
7-48
9 ZSET Zero Point Setting
Sets the zero point in the machine coordinate system and
enables the software limit function.
7-52
10 ACC
Change Linear
Acceleration Time Constant
Changes the acceleration time for linear acceleration/
deceleration.
7-54
11 DCC
Change Linear
Deceleration Time
Constant
Changes the deceleration time for linear acceleration/
deceleration.
7-56
12 SCC
Change Filter Time
Constant
Changes the time constant for a moving average filter for
acceleration/deceleration.
7-58
13 CHG_FILTER Change Filter Type Changes the acceleration/deceleration filter type. 7-60
14 KVS Change Speed Loop Gain Changes the speed loop gain. 7-62
15 KPS Change Position Loop Gain Changes the position loop gain. 7-64
16 KFS Change Feed Forward Changes the feed forward control gain. 7-66
17 PRM_RD
Read SERVOPACK
Parameter
Reads a SERVOPACK parameter. 7-68
18 PRM_WR
Write SERVOPACK
Parameter
Write a SERVOPACK parameter. 7-70
19 ALM_MON
Monitor SERVOPACK
Alarms
Monitors SERVOPACK alarms. 7-72
20 ALM_HIST
Monitor SERVOPACK
Alarm History
Monitors SERVOPACK alarm history. 7-73
21 ALMHIST_CLR
Clear SERVOPACK Alarm
History
Clears SERVOPACK alarm history data. 7-75
22 ABS_RST Reset Absolute Encoder Initializes an absolute encoder. 7-77
23 VELO Speed Reference Operates with speed control mode. 7-80
24 TRQ Torque Reference Operates with torque control mode. 7-84
25 PHASE Phase Reference Operates with phase control mode. 7-89
26 KIS
Change Position Loop
Integration Time Constant
Changes the integration time constant for the position
loop.
7-93
R
R
R
R
R
R
R
R
R
R
R
R
R

 Loading...
Loading...




