7.2
Motion Command Details
7-73
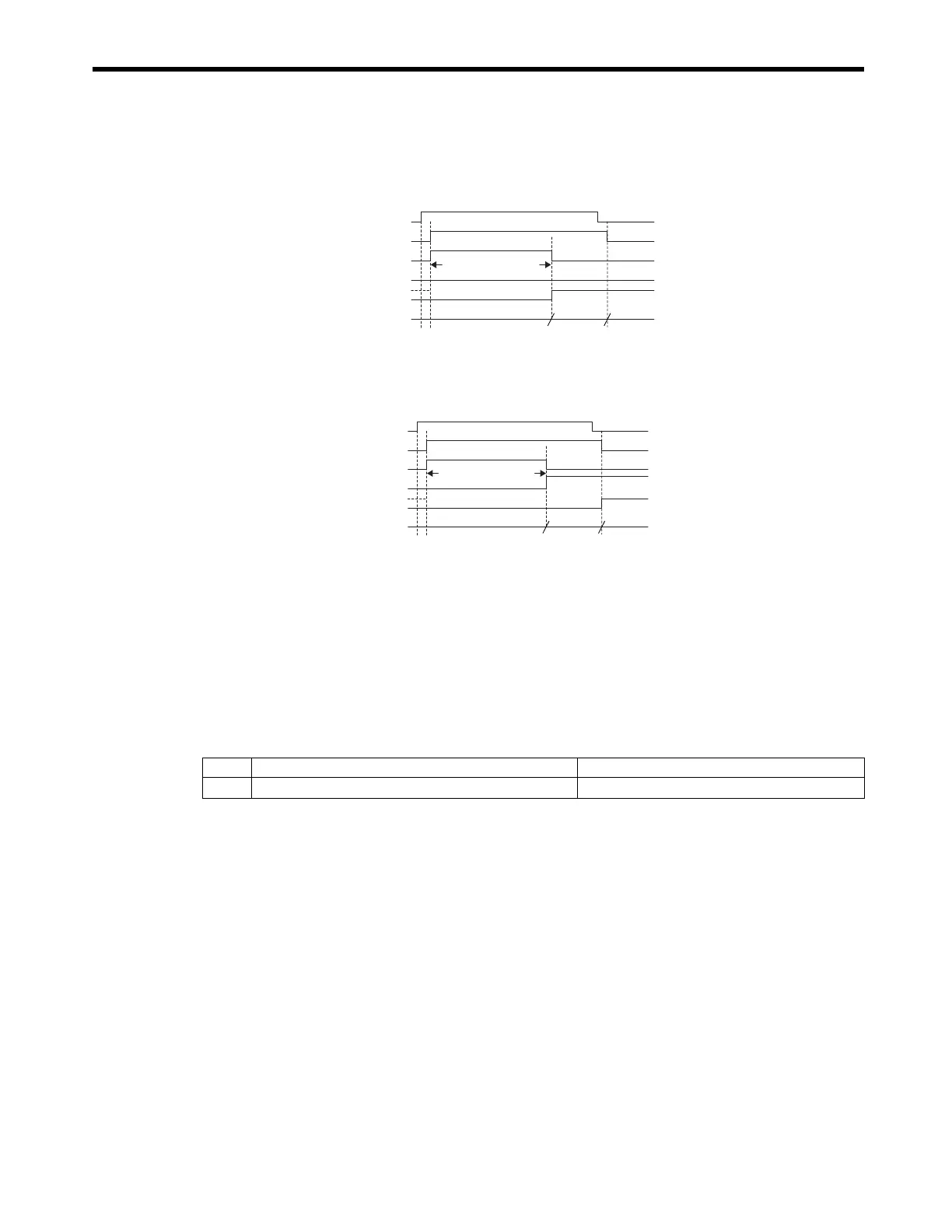
( 4 ) Timing Charts
[ a ] Normal End
[ b ] Error End
7.2.19 Monitor SERVOPACK Alarm History (ALM_HIST)
The ALM_HIST command reads the alarm history that is stored in the SERVOPACK and stores it in
Servo Alarm Code (monitoring parameter IW
2D).
( 1 ) Executing/Operating Procedure
1.
Check to see if all the following conditions are satisfied.
2.
Set OW
08 to 20 to execute the ALM_HIST motion command.
The ALM_HIST command will read the alarm history that is stored in the SERVOPACK and
store it in Servo Alarm Code (monitoring parameter IW
2D).
IW
08 will be 20 during command execution.
IB
090 will turn ON during the command processing and will turn OFF when the command
processing has been completed.
3.
Set OW
08 to 0 to execute the NOP motion command and then complete the
monitoring operation.
OW08 = 19 (ALM-MON)
IW08 = 19 (ALM-MON)
IB090 (BUSY)
IW2D
Alarm code (0) Alarm code (0)
IB098 (COMPLETE)
IB093 (FAIL)
Undefined length
of time
Specified
alarm code
Alarm code (0) Alarm code (0)
OW08 = 19 (ALM-MON)
IW08 = 19 (ALM-MON)
IB090 (BUSY)
IW2D
IB098 (COMPLETE)
IB093 (FAIL)
Undefined length
of time
Alarm code
(0)
No. Execution Conditions Confirmation Method
1 Motion command execution has been completed.
IW
08 is 0 and IB
090 is OFF.

 Loading...
Loading...




