7.2
Motion Command Details
7-45
( 3 ) Aborting
Axis travel can be stopped during FEED command execution by aborting execution of a command.
A command is aborted by setting the Command Abort bit (OB
091) to 1.
• Set the Command Abort bit (OB
091) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the Positioning Completed bit (IB
0C1) will turn ON.
• The JOG operation will restart if the Command Abort bit (OB
091) is reset to 0 during
abort processing.
• This type of operation will also be performed if the motion command is changed during axis
movement.
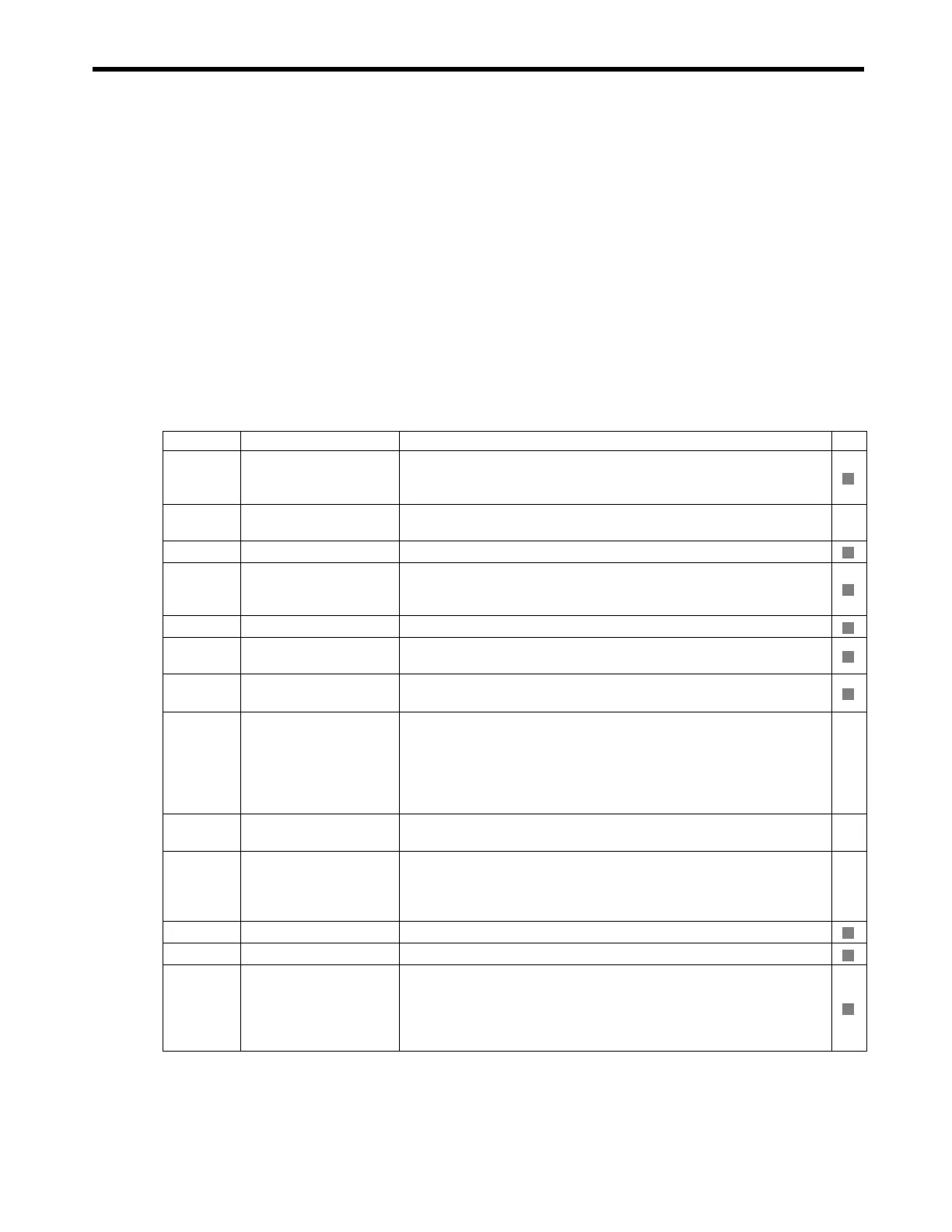
( 4 ) Related Parameters
[ a ] Setting Parameters
Parameter Name Setting SVR
OB
000
Servo ON
Turn the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Turn ON the power before setting the Motion Command (OW
08) to 7.
OB
013
Speed Loop P/PI Switch
Switches the speed control loop between PI control and P control.
0: PI control, 1: P control
−
OW
03
Function 1
Set the speed unit, acceleration/deceleration unit, and filter type.
OW
08
Motion Command
The JOG operation starts when this parameter is set to 7.
The axis is decelerated to a stop and the JOG operation is completed if this
parameter is set to 0 during the execution of a FEED command.
OB
091
Command Abort
The axis is decelerated to a stop if this bit is set to 1 during JOG operation.
OB
092
JOG/STEP Direction
Set the travel direction for JOG operation.
0: Positive direction, 1: Negative direction
OL
10
Speed Reference
Specify the speed for the positioning operation. This setting can be changed
during operation. The unit depends on the Function 1 setting (OW
03).
OW
18
Speed Override
This parameter allows the feed speed to be changed without changing the
Speed Reference (OL
10).
Set the speed as a percentage of the Speed Reference Setting. This setting can
be changed during operation.
Setting range: 0 to 32767 (0% to 327.67%) Setting unit: 1 = 0.01%
Example: Setting for 50%: 5000
−
OL
1E
Positioning Completed
Width
Set the width in which to turn ON the Positioning Completed bit (IB
0C1).
−
OL
20
Positioning Completed
Width 2
Set the range in which the Position Proximity bit (IB
0C3) will turn ON.
The Position Proximity bit will turn ON when the absolute value of the
difference between the reference position and the feedback position is less than
the value set here.
−
OL
36
Linear Acceleration Time
Set the rate of acceleration of the acceleration time constant for JOG operation.
OL
38
Linear Deceleration Time
Set the rate of deceleration of the deceleration time constant for JOG operation.
OW
3A
S-Curve Acceleration
Time
Set the acceleration/deceleration filter time constant. Exponential acceleration/
deceleration or a moving average filter can be selected in the Function 1
(OW
03).
Change the setting only after pulse distribution has been completed for the
command (IB
0C0 is ON).
R
R
R
R
R
R
R
R
R

 Loading...
Loading...




